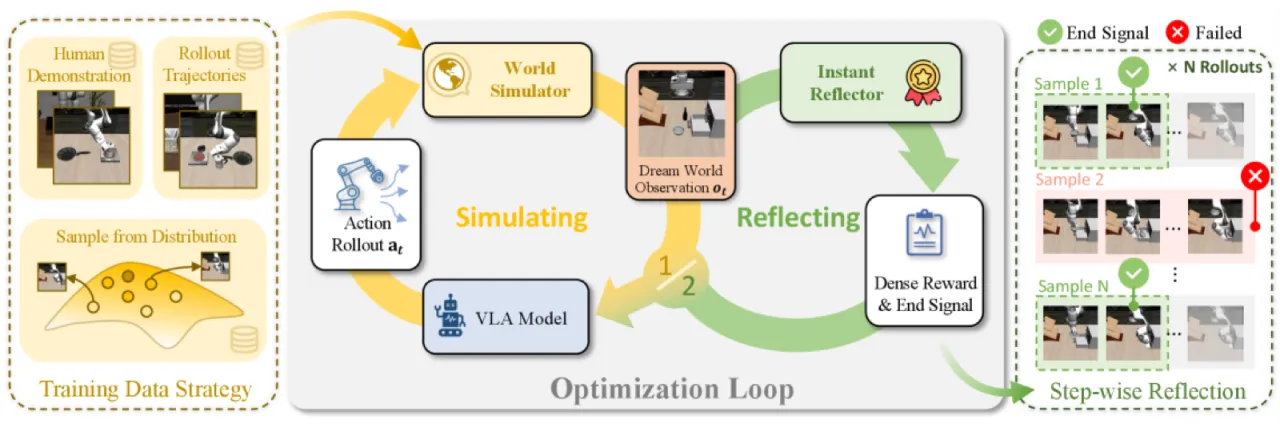
论文指出:"Both the world simulator and the instant reflector rely on diverse training data
to achieve high-fidelity simulation and accurate task evaluation."
当前框架仍依赖针对特定任务域收集的数据来训练模拟器和奖励模型;
作者预期"future advances in general-purpose world models will alleviate this dependency"。
计算效率(Computational Efficiency)
论文承认:"Policy optimization in our framework is currently slower than in concurrent methods
due to computational bottlenecks in simulator-based trajectory generation."
基于世界模拟器的轨迹生成速度慢于直接在仿真器(如 IsaacGym)中运行策略的方法,
作者将其列为"a key focus of our future work"。