Challenge 01
多模态感知 Multimodal Sensing & Perception
主流 VLA 缺乏显式深度信息;仅靠帧差估计深度对物体大小、相机距离高度敏感。环境噪声(反射、镜头光晕、水尘遮挡)严重影响感知质量。触觉模态缺失导致精细力控任务无法完成:"touch modality would allow VLA to perform delicate tasks that require careful application of force"。代表方法:MolmoAct、SpatialVLA(引入深度学习);SimplerEval(分布漂移测试)。
Challenge 02
鲁棒推理 Robust Reasoning
LLM 的推理能力迁移到 VLA 后显著衰减——即便是抓取、放置、开抽屉等简单任务也存在较高错误率。长时程任务中错误率随 horizon 增加而累积:"error rate on such simpler tasks must approach near perfection" 才能支撑复杂场景部署。工具理解与选择能力依然缺失。代表方法:Emma-X、CoT-VLA、MolmoAct;评估基准:LIBERO、SimplerEnv。
Challenge 03
训练数据质量 Quality Training Data
Open-X-Embodiment 整合了约 70 个数据集、超过 100 万条演示,但模型对分布外环境依然脆弱:"VLA models are often brittle to out-of-distribution environments and robot setups"。Sim2Real 差距、具身差异、摄像头位置变化以及人工采集者的不一致性共同引入大量方差与噪声,新场景通常需要额外微调数据。
Challenge 04
评估体系 Evaluation
真实机器人、环境与物体资源稀缺,仿真评估与真实性能相关性差:"environments simulated in such tools often fail to capture enough details of their real-life counterparts"。光照、反射、纹理、PD 参数(stiffness/damping)的失真都会导致"poor correlation between in-simulation and real-life performance"。SimplerEnv 通过随机化纹理、光照、相机位姿等改善评估可靠性,但 sim-to-real gap 根本问题仍未解决。
Challenge 05
跨机器人泛化 Cross-Robot Action Generalization
不同机器人平台的动作空间异质性使零样本迁移极为困难:"training on action data from a fixed set of embodiments often fails to generalize to others"。自由度数量、结构差异(机械臂 vs. 四足机器人 vs. 自动驾驶车辆)以及控制接口多样性,使统一动作表征成为关键难题。Zheng 等(2025)对通用动作泛化问题进行了系统研究。
Challenge 06
资源效率 Resource Efficiency
机器人平台存在空间与能量约束;灾难现场等断网环境无法依赖云推理:"disaster zones are often cutoff from the internet and telecommunication services"。小模型性能显著落后于大模型,但大模型的在端部署成本难以承受。"striking the right balance between VLA model capacity and resource efficiency remains key"。代表系统:OCTO (2023)、OpenVLA、RT-2、MolmoAct。
Challenge 07
全身协调 Whole-Body Coordination
移动操作要求在运动中同步控制底盘与末端执行器,动作空间高维耦合是核心难题:"dominant challenge is the high-dimensional search space of coupled actions"。基于模型的控制(MPC)面临实时性瓶颈;基于学习的控制存在探索难度大、credit assignment 困难、以及安全保障弱的问题。代表系统:Mobile ALOHA、UMI on Legs、ACDIT、WBMPC。
Challenge 08
安全保障 Safety Assurances
具身 AI 的错误动作可能直接造成人身或财产伤害:"robot equipped with embodied AI may harm the victims while saving them due to imperfect actions"。在无人监督的复杂场景(如灾难救援)中,安全护栏的设计尤为关键。当前代表工作 SafeVLA 采用 RL-based 安全对齐,但在性能与安全之间的权衡仍是开放问题。
Challenge 09
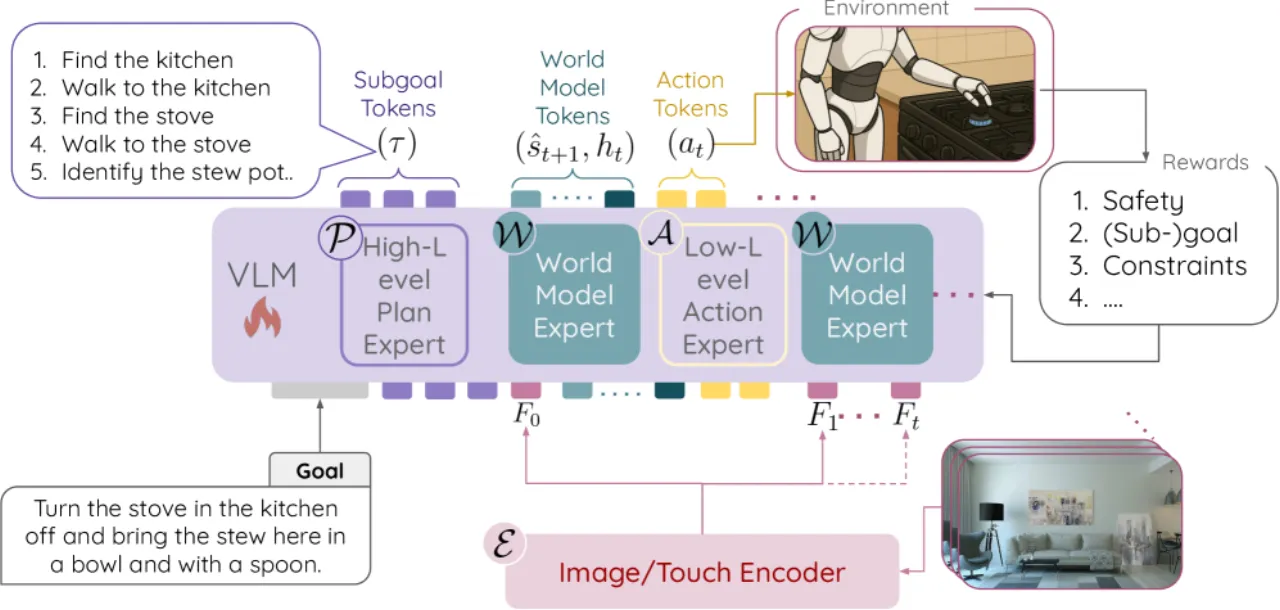
智能体框架 Agentic Frameworks
VLA 模型嵌入多智能体系统的研究尚处早期:如何分配自主级别、如何通过智能体间通信实现分布式决策、以及如何生成可信赖且可验证的工作流程,均是未解问题。Yang 等(2025)提出了包含 LLM 规划器 + VLM 验证器 + VLA 执行器的异构智能体框架作为初步探索。
Challenge 10
人机协作 Human-Robot Coordination
当前 VLA 模型的人机通信是单向的(人 → 机器人),机器人无法向人类传达意图或请求缺失信息。CoT-VLA 通过在动作解码前生成意图状态可视化输出,Emma-X 通过高层自然语言 rationale 作出初步探索。真正的双向交互——"reasoning traces and questions for the user seeking missing information"——仍是开放目标。