01 动机
视觉伺服是机器人精确定位与控制的基础技术。然而,无纹理物体(textureless objects) ——工业场景中大量存在的表面均匀、缺乏特征点的零件——令传统方法举步维艰: 手工设计的特征无法建立稳定的视觉对应,深度学习方法又多依赖单帧预测, 遭遇遮挡或光照突变时极易失稳。
"Visual servoing is fundamental to robotic applications, enabling precise positioning and control. However, applying it to textureless objects remains a challenge due to the absence of reliable visual features. Moreover, adverse visual conditions, such as occlusions, often corrupt visual feedback, leading to reduced accuracy and instability in visual servoing."
— 论文摘要原文
95.1%正常条件伺服成功率(本文方法)
82.6%不利条件伺服成功率(本文方法)
89.9%真实抓取任务平均成功率
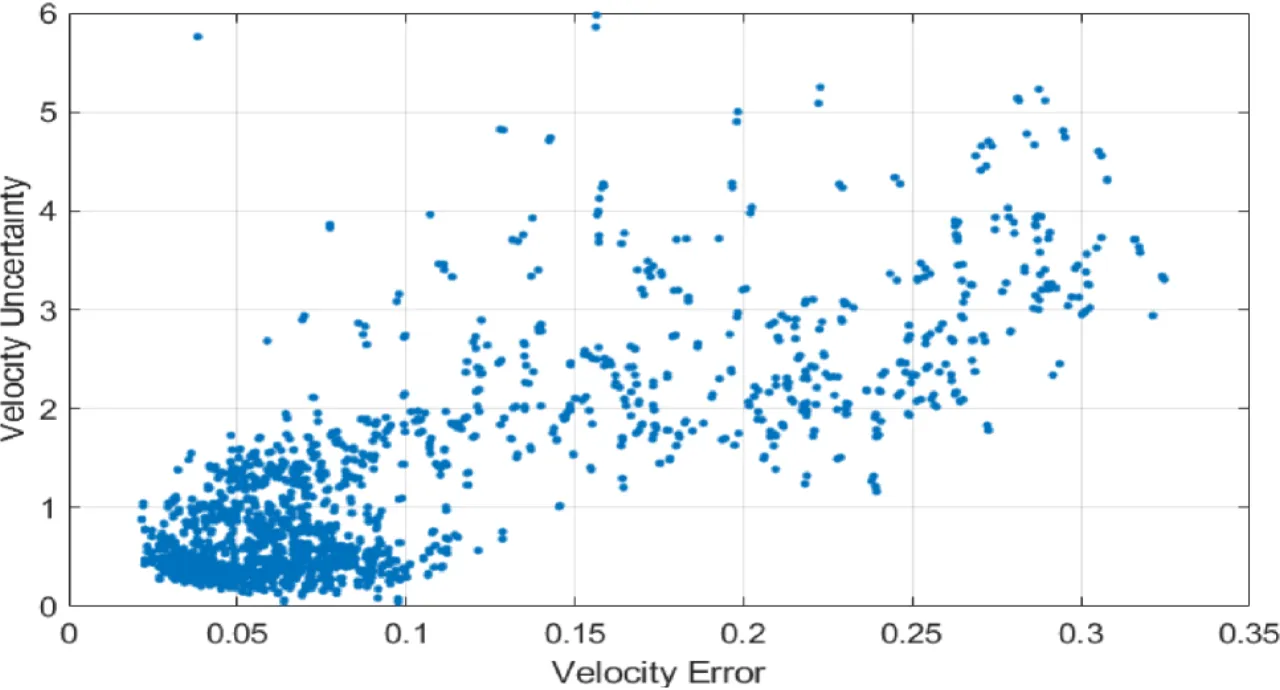
0.81速度不确定度与速度误差 Pearson 相关系数
现有方法的不足
IBVS 的局限
- 依赖手工设计特征,无纹理物体提取困难
- 存在局部极小值问题,convergence basin 有限
- 基于单帧预测,忽略时序信息
PBVS 的局限
- 依赖单帧位姿估计,遮挡/光变时容易失败
- 不输出控制不确定度,无安全降速机制
- "often fail under adverse visual conditions, leading to unstable control"