01 动机 Motivation
人工智能的核心目标之一是构建能够解决多样化任务的通用智能体。然而,传统强化学习方法面临两大根本挑战:其一,不同环境往往有各自独立的状态空间与动作空间,难以统一建模;其二,奖励函数的设计依赖于任务特定知识,无法跨环境迁移。与此同时,文本引导图像生成模型(如 DALL-E、Stable Diffusion)已展现出惊人的跨域组合泛化能力——仅凭文本描述即可生成从未见过的新图像。
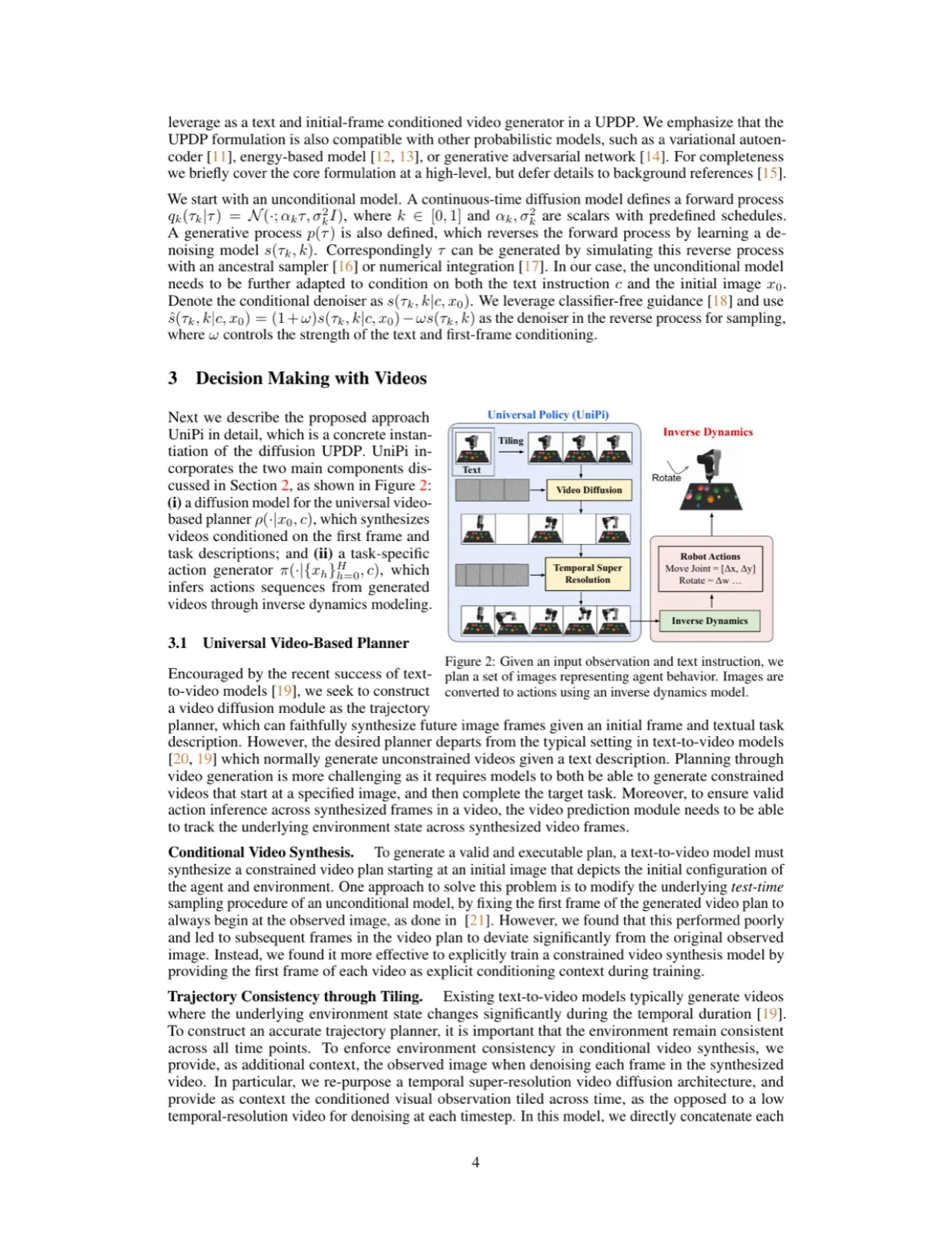
"A goal of artificial intelligence is to construct an agent that can solve a wide variety of tasks. Recent progress in text-guided image synthesis has yielded models with an impressive ability to generate complex novel images, exhibiting combinatorial generalization across domains. Motivated by this success, we investigate whether such tools can be used to construct more general-purpose agents."
核心洞察是:图像是跨环境的统一表示。无论是 Atari 游戏、机器人抓取还是导航任务,环境状态均可用图像帧表示,从而在统一的视觉空间中学习跨任务的规划能力。文本则作为目标规范,天然具备组合泛化性——不同语言短语的新组合即可指定新目标,无需重新训练。

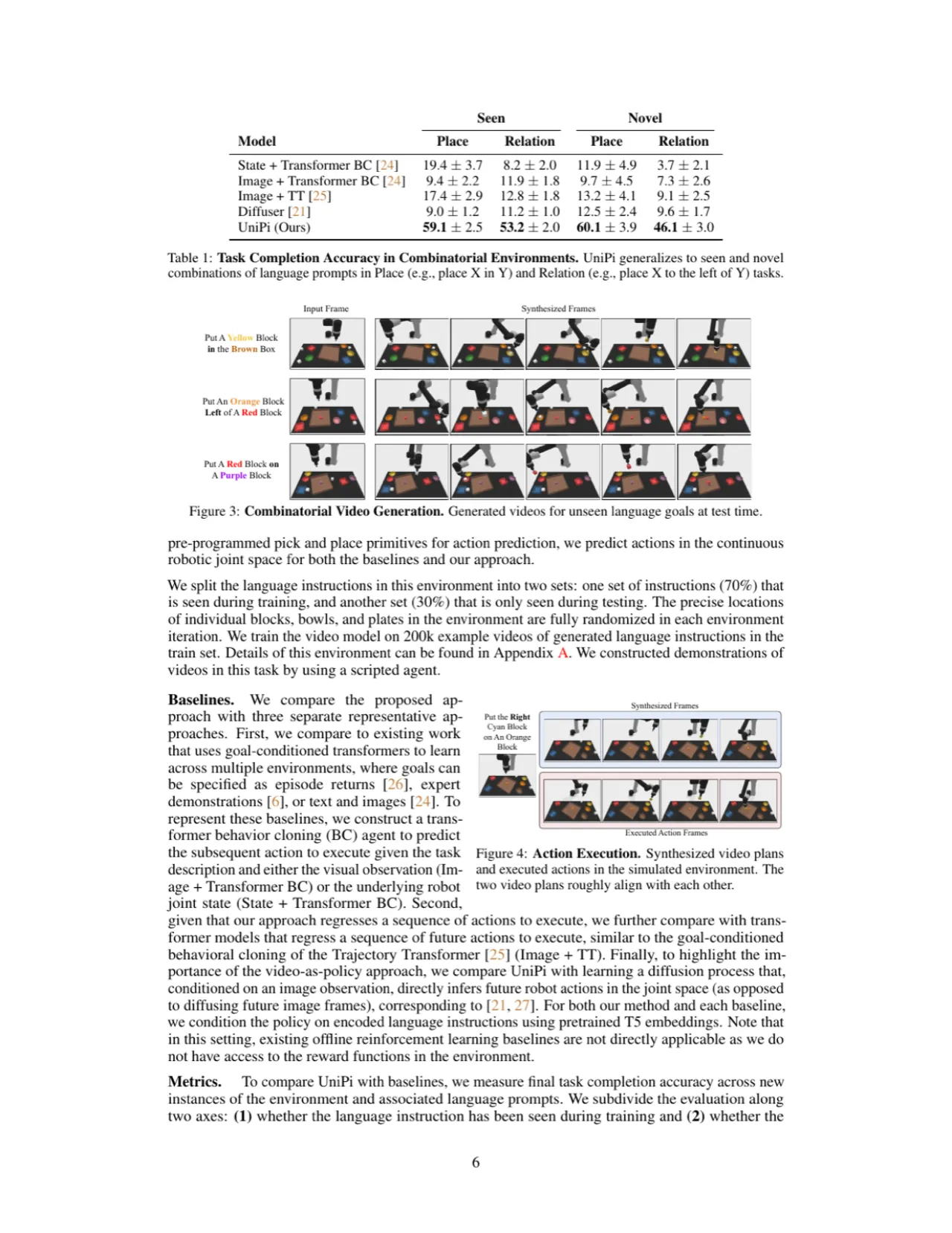
77.1%UniPi 在 novel 指令任务中的完成率(vs. Transformer BC: 59.4%)
72.6%预训练后在机器人抓取任务上的成功率
244.66FID↓(UniPi 视频质量,使用互联网预训练数据)
8种不同机器人操作任务,统一策略同时处理