01 动机
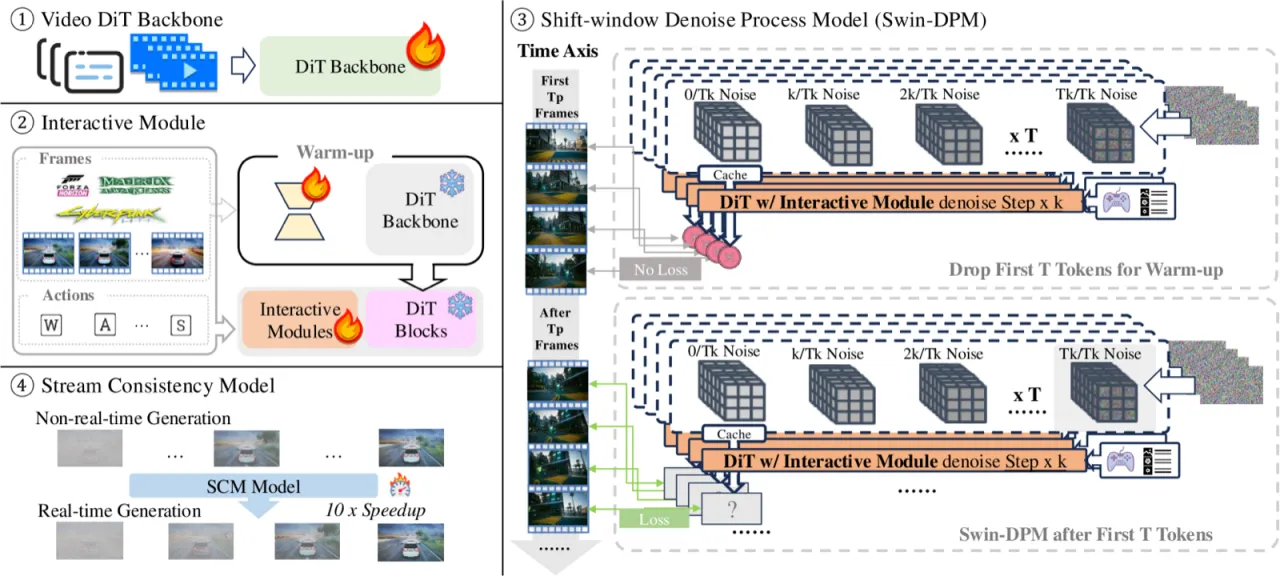
现有世界模型面临三个核心瓶颈:(1)仅聚焦于低保真非 AAA 游戏;(2)生成长度受限(通常不超过约一分钟);(3)无法实现实时渲染。这些问题使世界模型难以作为真正可交互的游戏引擎或仿真平台。
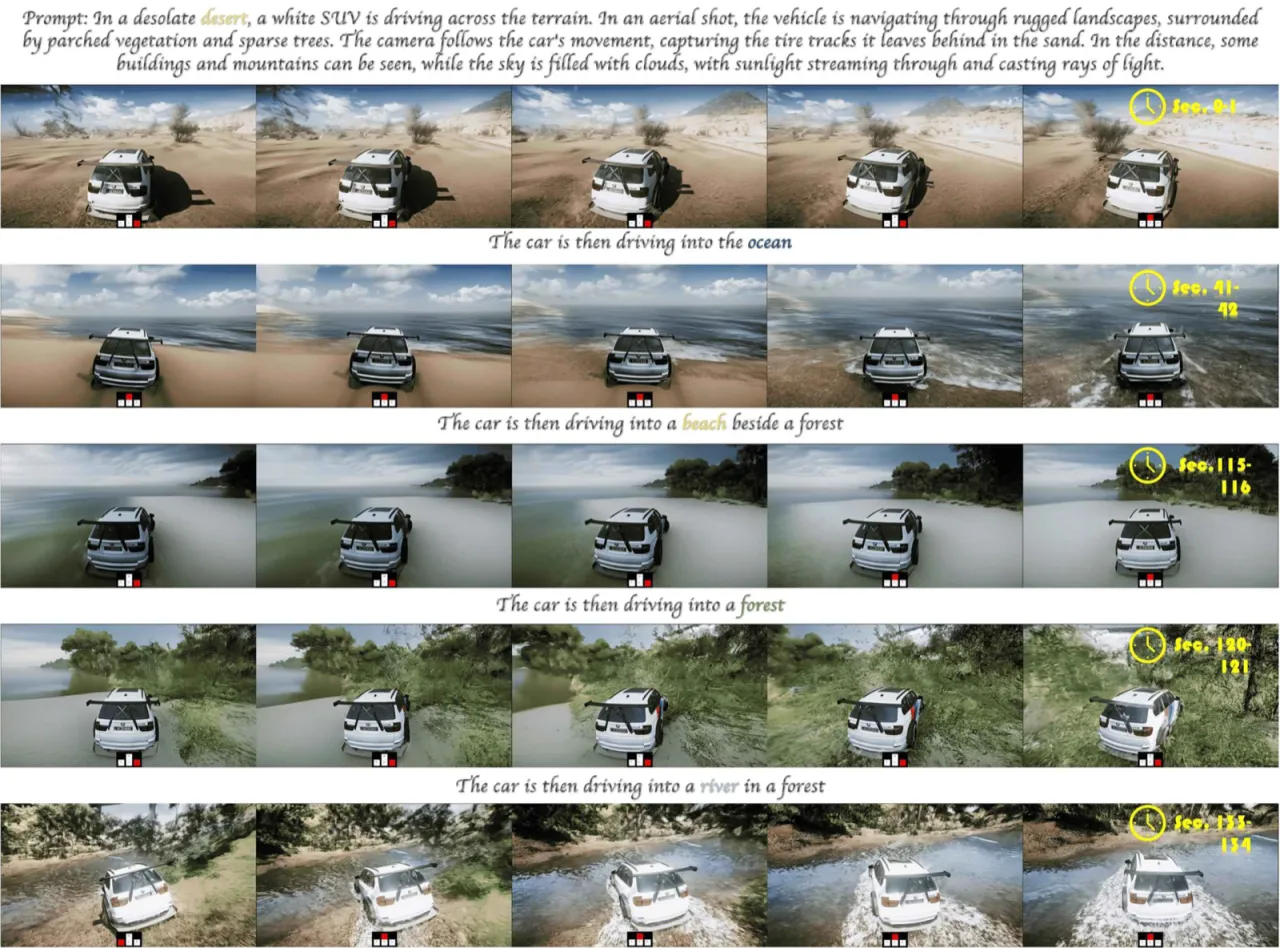
"The first scalable, high-fidelity 1280×720 pixel world model in real time" — combining AAA game realism, infinite-length generation, and frame-level control in a single system.

720p生成分辨率 (1280×720)
8–16 FPS实时渲染速度
2.7B模型参数量
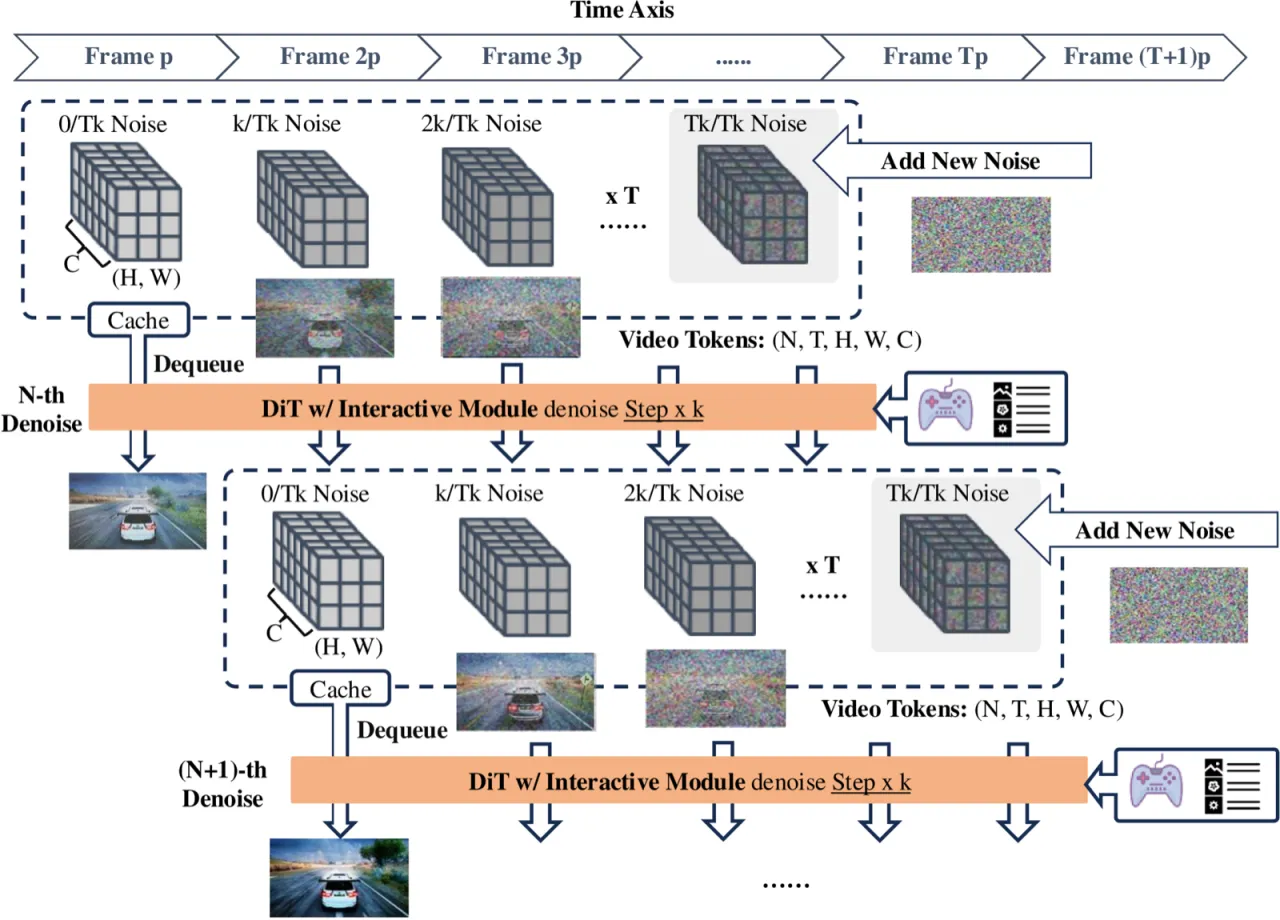
∞理论生成长度(无限时域)