02 方法
StarVLA 的核心是 backbone–action head 双向模块化 :骨干网络(VLM 或世界模型)与动作解码头
各自遵守统一的 I/O 协议,可独立替换而不影响另一侧。训练、推理与部署共用同一套代码,
配置通过 YAML 声明式指定。
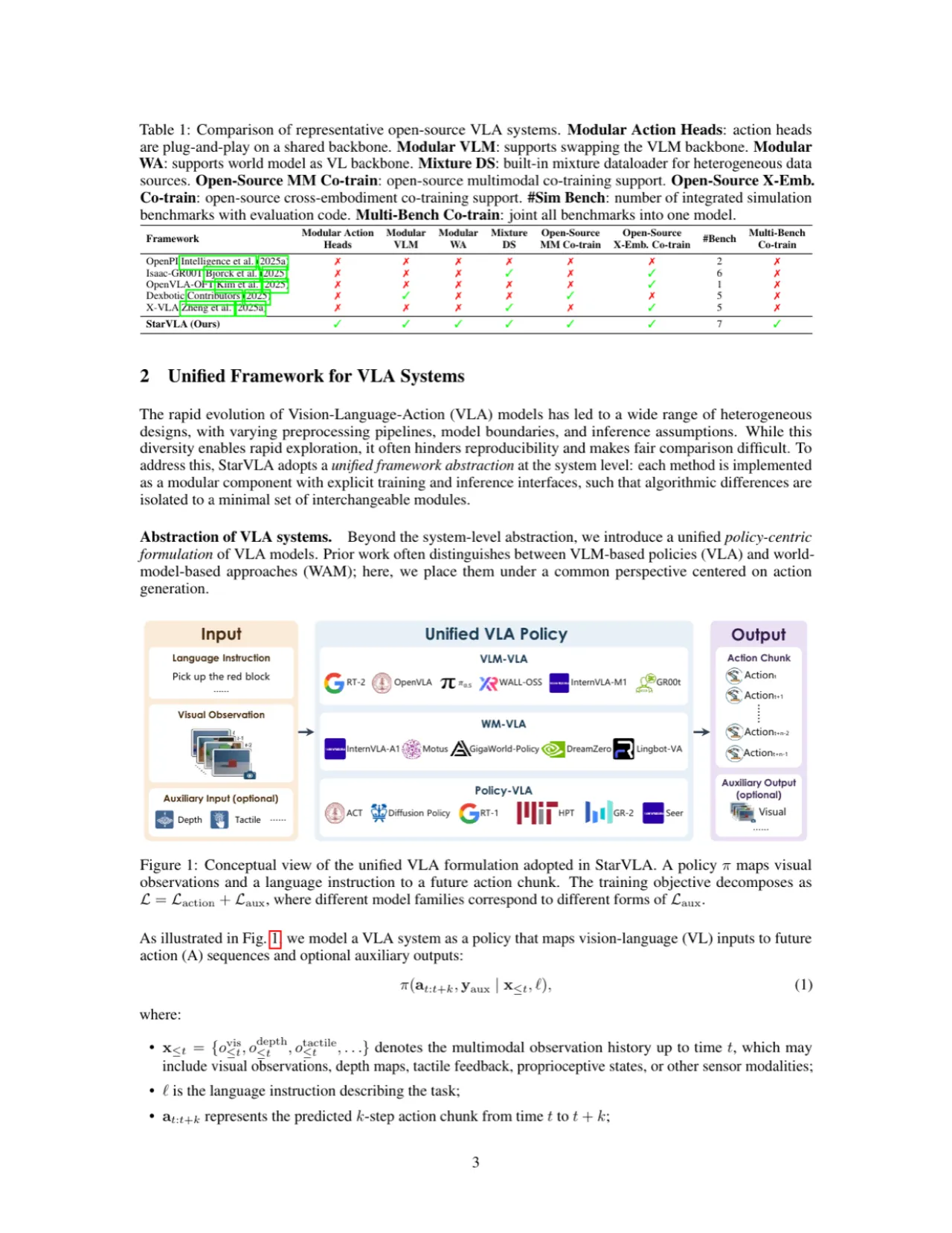
统一抽象:Unified VLA Policy
策略被形式化为 π(at:t+k , yaux | x≤t , ℓ) ,
将多模态观测历史映射到 k 步动作序列。训练损失为 ℒ = ℒaction + ℒaux ,
其中 ℒaux 作为归纳偏置,可为零(纯行为克隆)或语言对齐/空间感知损失。
不同 VLA 范式均可理解为该公式在不同归纳偏置下的实例化。
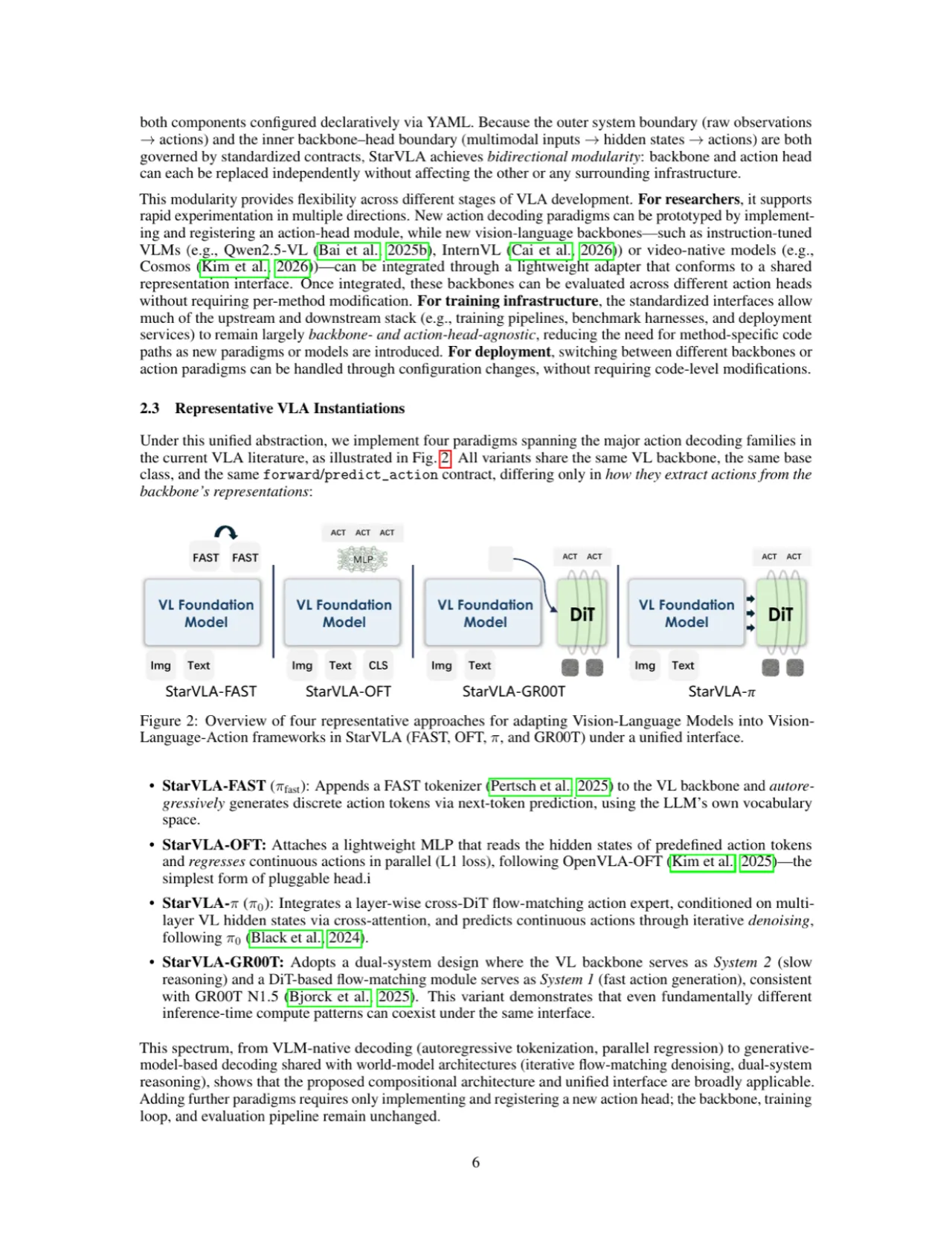
图 2:四种代表性动作解码范式。
StarVLA-FAST :自回归生成离散动作 token(基于 FAST tokenizer);
StarVLA-OFT :通过轻量 MLP 直接回归连续动作;
StarVLA-π (π₀) :flow matching 迭代去噪;
StarVLA-GR00T :双系统推理(System 1 快速反应 + System 2 慢速规划)。
四种变体共享相同的训练/推理接口,仅动作头实现不同。
统一 I/O 接口与 Server-Client 评测
StarVLA 为所有框架组件定义了两个核心方法:forward(raw_images, str, ...) 作为训练入口,
predict_action(raw_images, str, ...) 作为推理入口。
推理接口接受"归一化动作(均值=0,标准差=1)"并返回预测动作块(minus ground-truth 均值后的预测)。
这一设计与真实机器人传感器流镜像对应,使同一 checkpoint 可直接用于仿真评测和真实部署,
无需修改代码。评测基准代码通过 server-client 模式与模型推理解耦,benchmark 代码无需感知模型内部。
图 3:StarVLA 统一系统流水线。
左侧:统一数据流,连接异构机器人数据集、pluggable dataloader 与标准化数据表示;
右侧:模型前向传播路径,VL Foundation Model 骨干网络经 action head 输出动作,
再经 Server-Client 接口用于仿真评测(LIBERO、SimplerEnv、RoboTwin 等)和真实机器人部署。
整个流水线由 YAML 配置驱动,支持 Unified Hamiltonians、Co-train 和 Multi-Bench 训练策略。
灵活训练范式
监督行为克隆(SFT)
最直接的训练方式,ℒaux = 0 ,仅优化动作预测损失。
StarVLA 将此作为建立单基准可复现基线的标准起点,
并提供了 benchmark 特定的训练/评测脚本。
多目标协同训练(Co-training)
在动作预测的同时引入 VLM 辅助目标(如空间感知 grounding 损失),
保留模型的语言/视觉推理能力。
实验表明,空间引导协同训练可将 Google Robot 成功率从 66.1% 提升至 86.2%,
同时维持 RefCOCO-g 上 71.2 IoU@0.5 的空间感知精度。
跨体态训练(Cross-embodiment)
通过 mixture dataloader 混合来自不同机器人平台的数据,
训练单一泛化模型,实现跨 LIBERO、SimplerEnv、RoboTwin、RoboCasa-GR1 的联合训练。
强化学习微调(RL fine-tuning)
计划中的功能,目前仍在持续集成中("an ongoing integration effort",论文明确说明)。