01 动机 Motivation
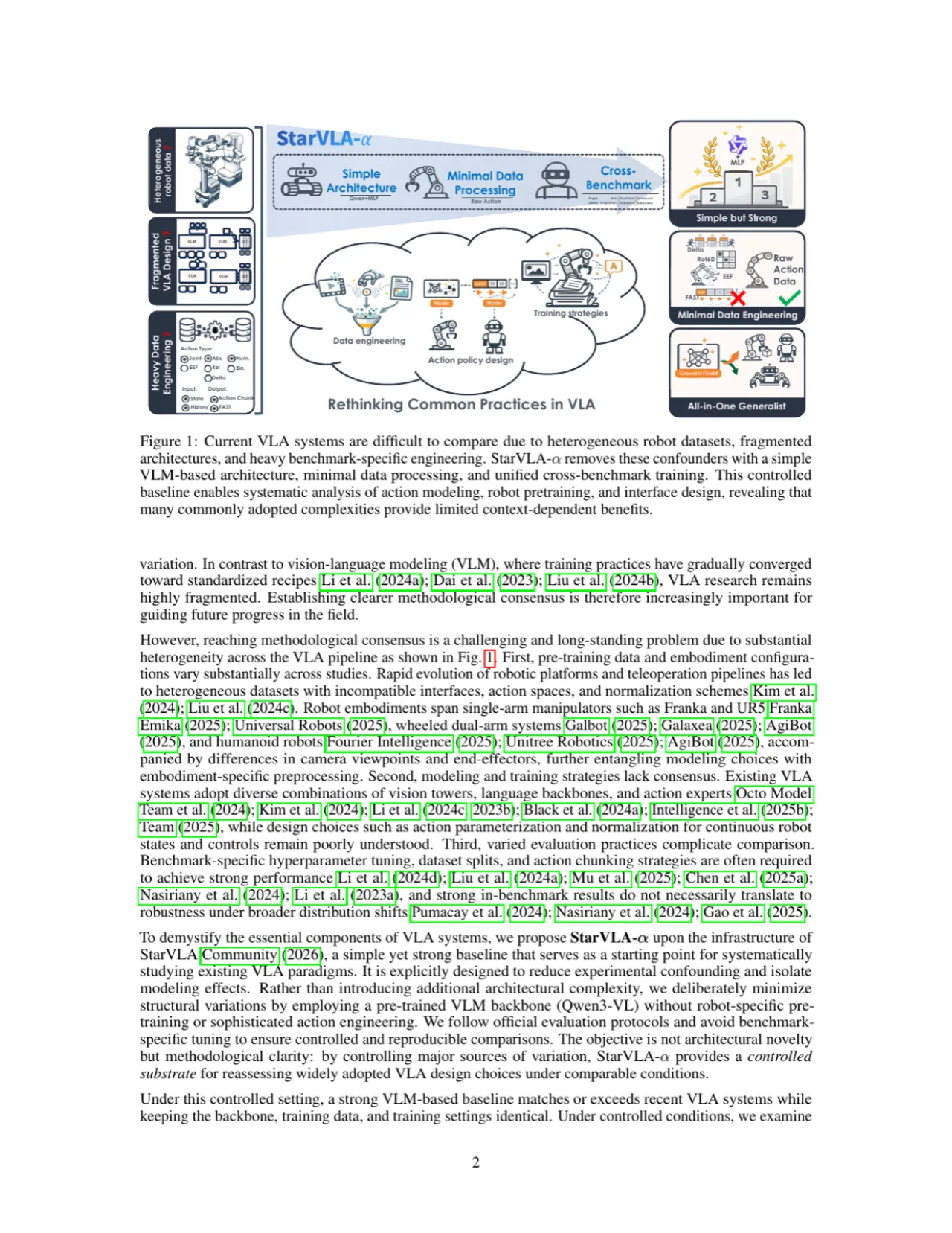
VLA 领域正高速发展,但存在严重的方法碎片化问题:不同方法在架构、训练数据、体现配置(embodiment configuration)和 benchmark 特定工程(benchmark-specific engineering)方面差异极大,导致难以判断哪些设计决策真正驱动了性能提升。
"The VLA landscape remains highly fragmented and complex: as existing approaches vary substantially in architectures, training data, embodiment configurations, and benchmark-specific engineering."
+20%单一泛化模型在 real-world RoboChallenge 上超越 π₀.₅
4个主流 benchmark 统一训练:LIBERO / SimplerEnv / RoboTwin / RoboCasa
3大核心设计轴系统评估:action modeling / robot pretraining / interface engineering
Qwen2-VL轻量级 MLP action head,无需任何 benchmark 特定工程
当前 VLA 研究的三大核心难题:
- 设计混淆(Confounders):不同方法同时改变多个因素,无法分离各因素对性能的独立贡献。
- Benchmark 特定适配:为某个 benchmark 定制的优化技巧,在其他 benchmark 或真实机器人上往往失效。
- 再现性差:训练设置、数据来源、评估协议各异,使横向比较几乎不可能。
StarVLA-α 的核心假设是:通过刻意减少实验变量(confounders),可以系统地评估哪些设计选择真正有效,哪些只是特定场景下的过度工程。