01 动机
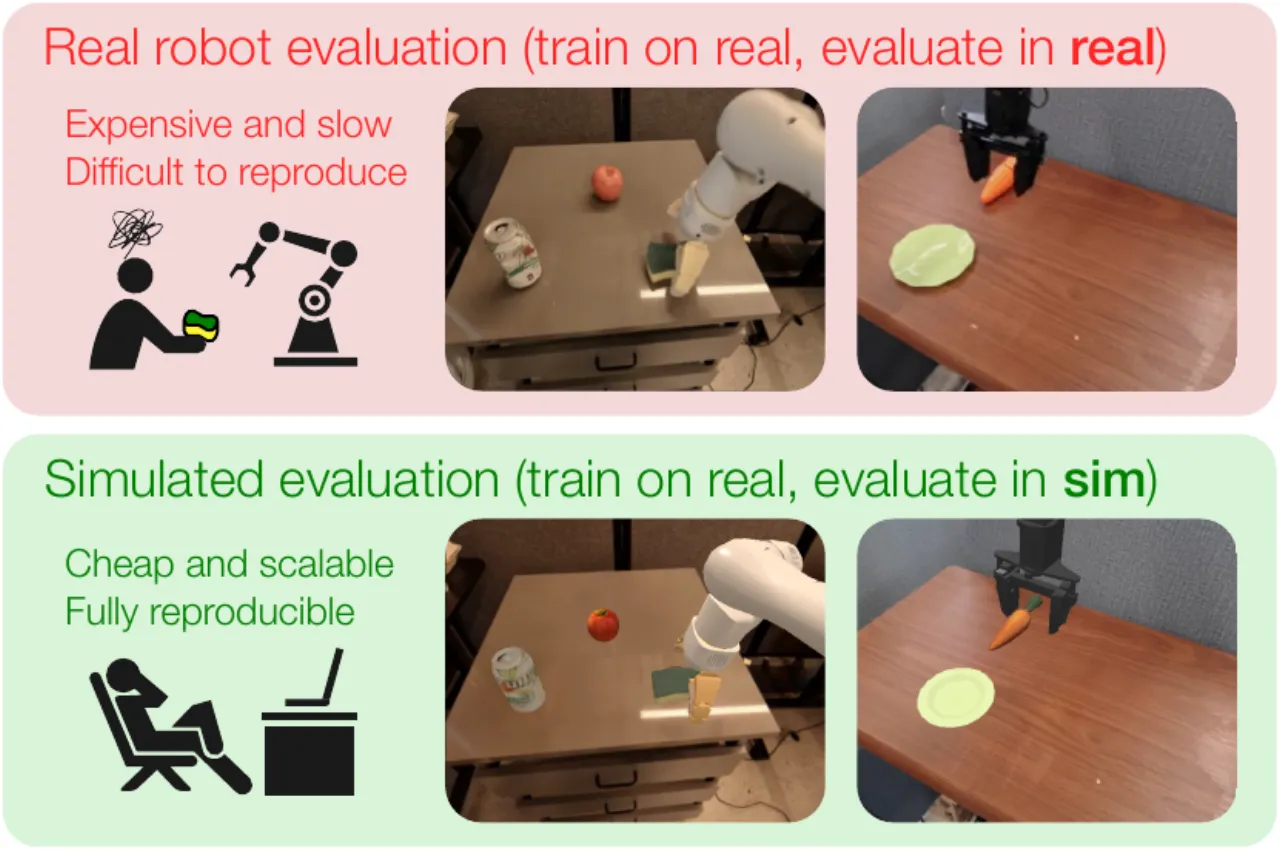
随着通用机器人操作策略(如 RT-1、RT-2、Octo)的迅速发展,对其进行全面评估的代价也在急剧上升——真实世界评估需要大量人力、时间,且难以复现。本文核心问题是:能否将在真实数据上训练的策略放入仿真环境中评估,并使仿真结果与真实表现保持高度相关?
"Real-world evaluation of such policies is not scalable and faces reproducibility challenges, which are likely to worsen as policies broaden the spectrum of tasks they can perform."
~1500配对 sim-and-real 评估轨迹
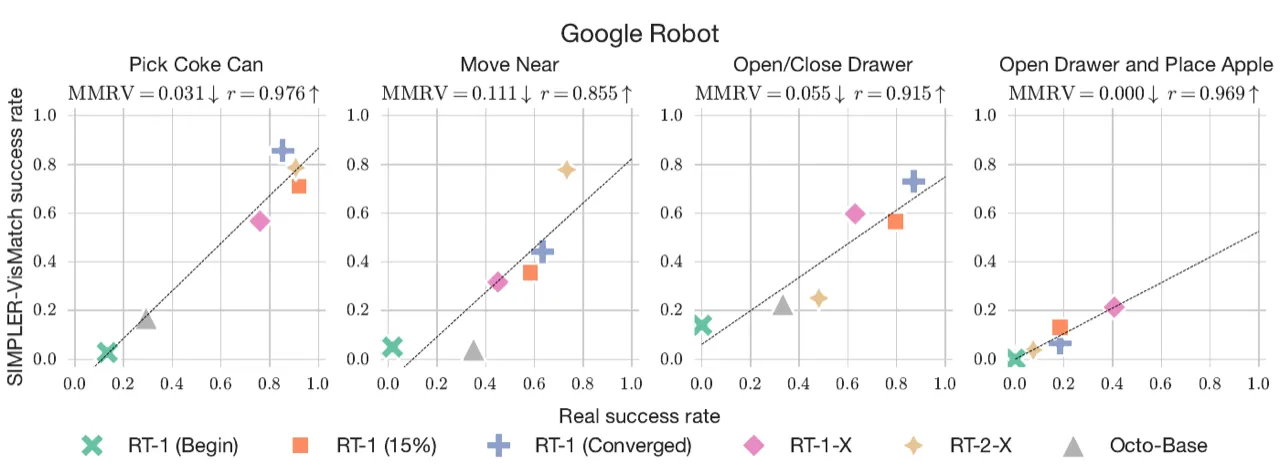
0.924SIMPLER-VisMatch Pearson r(Google Robot 平均)
0.056SIMPLER-VisMatch MMRV(越低越好)
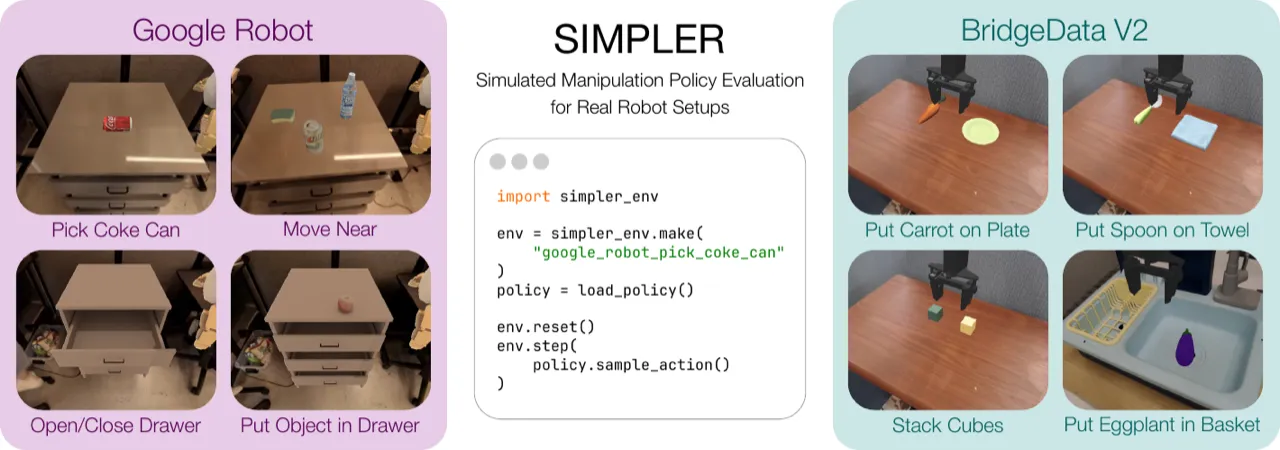
2支持的机器人形态:Google Robot & WidowX
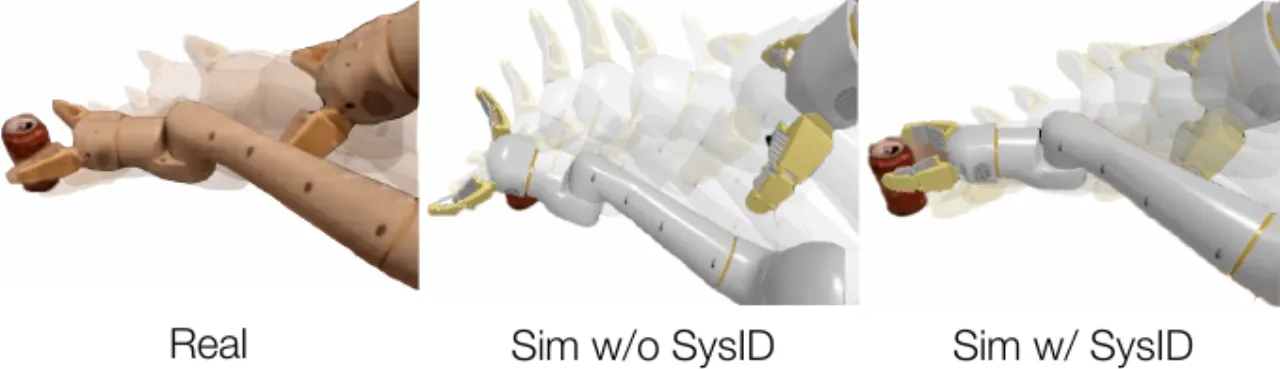
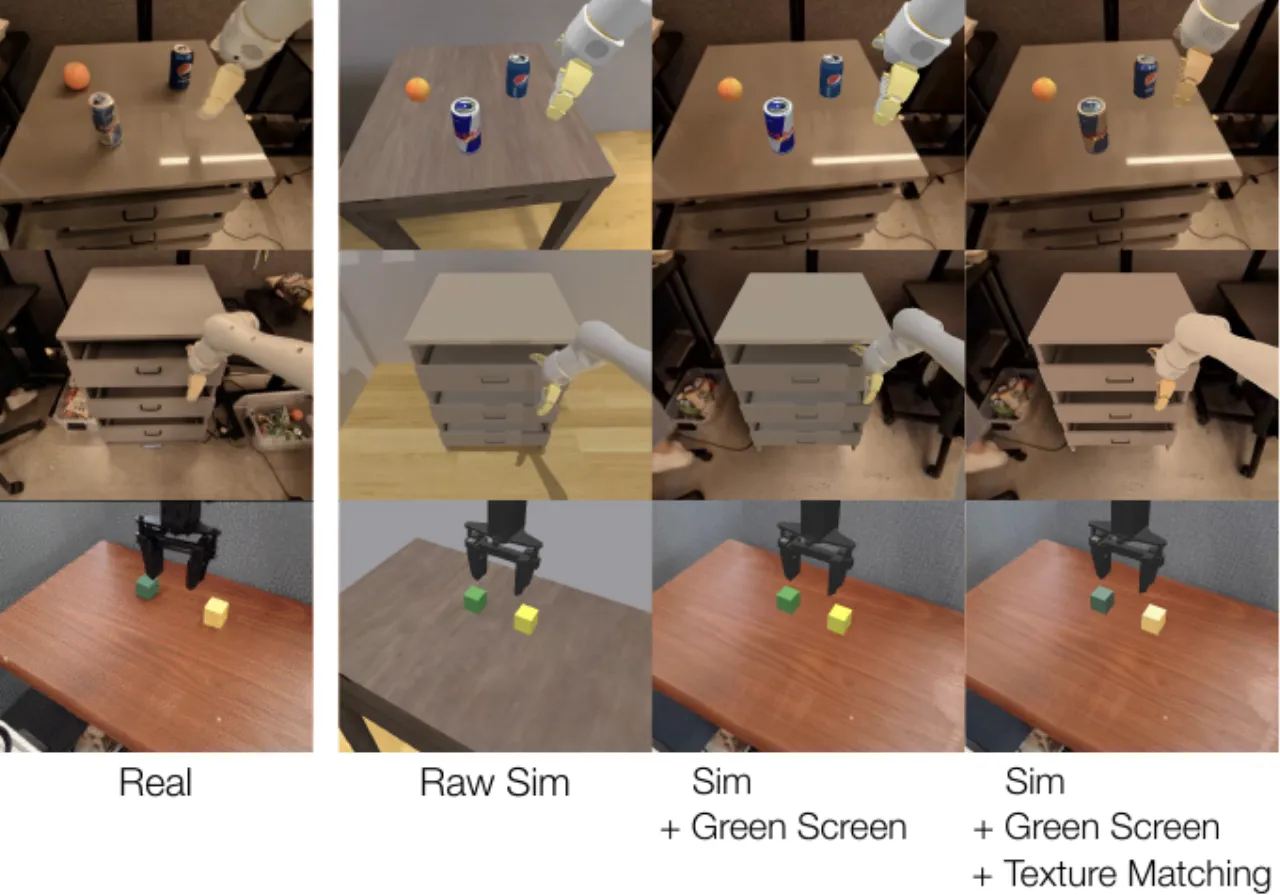
现有数字孪生(digital twin)方案需要大量手工建模,不具备规模化潜力。本文的关键洞察是:不需要精确复刻真实环境,只需仿真策略排名与真实排名高度一致即可。为此,需解决两个核心间隙:控制间隙(control gap)和视觉间隙(visual gap)。