01 动机
构建家庭辅助机器人一直是视觉与机器人领域的核心追求。机器人要完成开冰箱、拿取物品等日常任务,就必须能够感知并操作具有可动部件的关节体(如门、抽屉、水龙头)。然而现有仿真环境在物理真实性、关节体规模和向真实机器人的迁移能力上均存在明显不足。
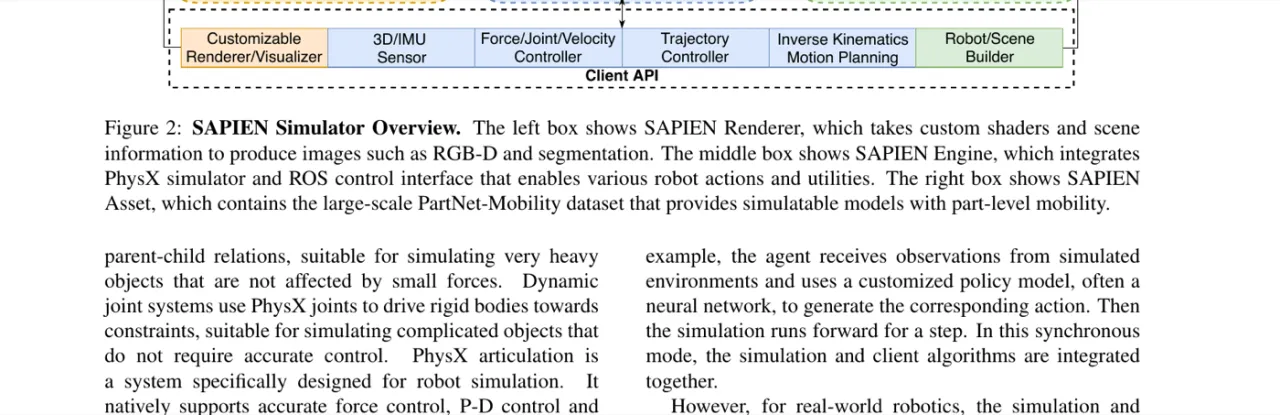
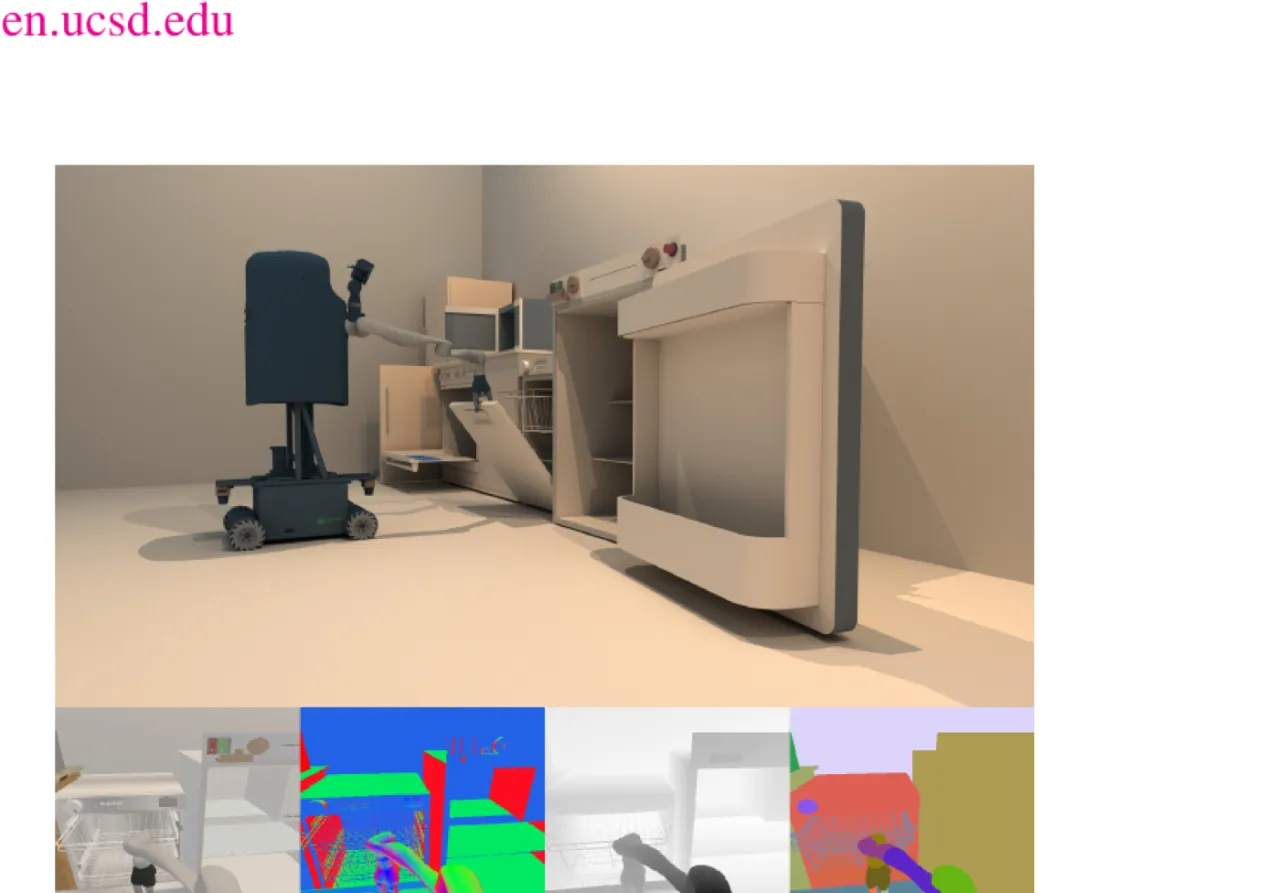
"We take one step further in constructing an environment that supports household tasks for training robot learning algorithm. Our work, SAPIEN, is a realistic and physics-rich simulated environment that hosts a large-scale set for articulated objects."
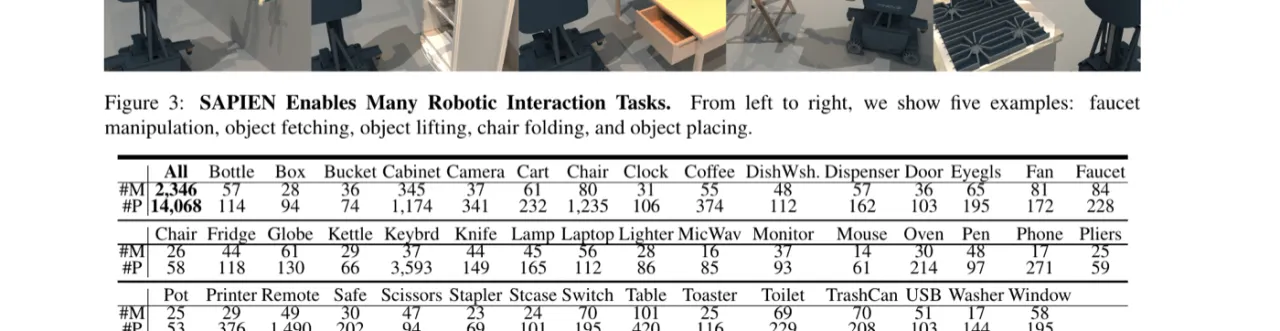
46关节体物体大类
14,068PartNet-Mobility 模型数
2,346带运动属性标注的模型
~5000Hz仿真器最高运行频率
为什么需要 SAPIEN?
现有仿真环境(OpenAI Gym、RLBench、DeepMind Control Suite 等)普遍存在以下问题:
- 物理真实性不足:大多简化物理,难以模拟关节体的复杂约束与运动。
- 物体种类稀少:仅支持少量预定义场景,缺乏大规模多样化关节体。
- 缺乏部件级理解:无法支持需要精确部件感知的任务(如识别水龙头手柄并旋转)。
- 与真实机器人的语义鸿沟:不提供 ROS 兼容接口,难以迁移到真实硬件。
如表 1 所示,与 Shape2Motion、RPM-Net、Hu et al. 等已有部件数据集相比,SAPIEN 以 46 类、2,346 个模型(14,068 个可动部件)显著领先,且提供丰富的纹理和真实渲染效果。