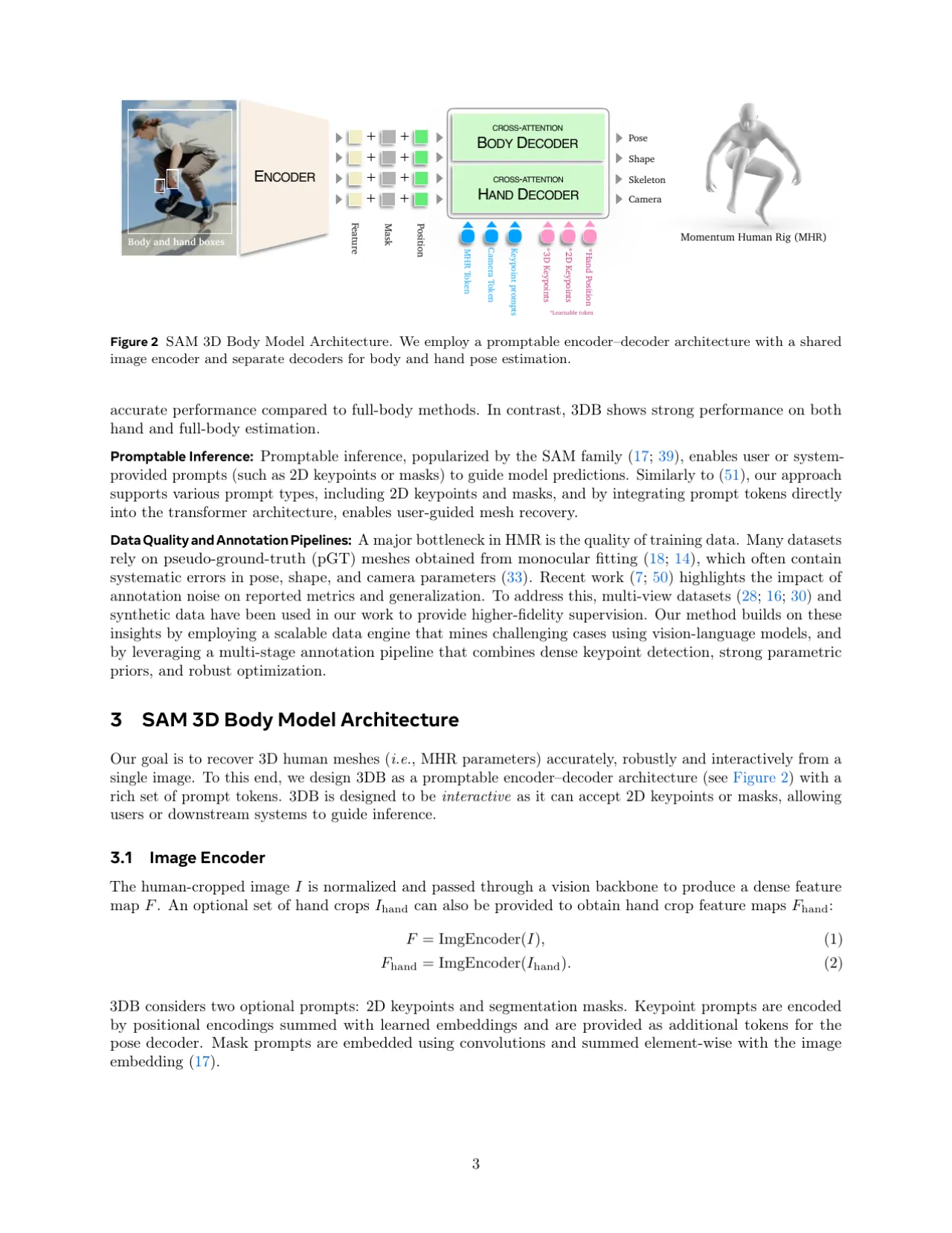
01 动机
从单张图像估计三维人体姿态与形状,对机器人、生物力学等真实世界应用至关重要。然而,现有方法在复杂姿态、严重遮挡或非常规视角下表现不稳定,且难以在统一框架中精确估计身体、手部和脚部。
"existing approaches still exhibit unsatisfactory robustness when applied to in-the-wild images, which limits their applicability to real-world scenarios such as robotics and biomechanics. In particular, current models often fail on individuals presenting challenging poses, severe occlusion, or captured from uncommon viewpoints. They also struggle to reliably estimate both the overall body pose and the fine details of the hands and feet in a unified full-body framework."
核心挑战
数据层面
- 大规模多样人体姿态数据集的采集天然困难且计算代价高昂
- 现有数据集要么多样性不足(实验室采集),要么网格质量低(伪标注)
- 现有野外数据集在规模和多样性上仍显不足
模型层面
- 现有架构未充分考虑身体与手部姿态估计在优化机制上的本质差异
- 缺乏有效的训练策略来处理单目图像中的不确定性和模糊性
- SMPL 等传统表示将骨骼结构与体表形状混杂,可解释性受限
7M高质量标注训练图像
5:1用户偏好研究胜率(vs. 最强基线 NLF 胜率 83.8%)
7,800人类偏好研究参与人数
SoTA五大标准基准 + 五个新数据集全面领先