SAM 1 和 SAM 2 开创了交互式分割先河,但它们依赖点、框、掩码等几何提示,每次只能分割单个目标实例,无法回答"视频中所有的猫在哪里"这类概念级查询。现实应用(机器人、内容创作、AR、数据标注、科学研究)迫切需要一个能够理解视觉概念、并一次性找出所有匹配实例的模型。
"SAM 1 and SAM 2 focus on visual prompts and segment a single object instance per prompt … they did not address the broader task of finding and segmenting all instances of a concept appearing anywhere in the input."
图 1:SAM 3 在可提示视觉分割(左,鼠标点击)和可提示概念分割(右,短语 / 图像范例 / 组合)两项任务上均超越 SAM 2。右侧示例展示模型同时找出视频中所有匹配给定视觉概念的目标实例。
2×图像 & 视频 PCS 增益(相比现有最优系统)
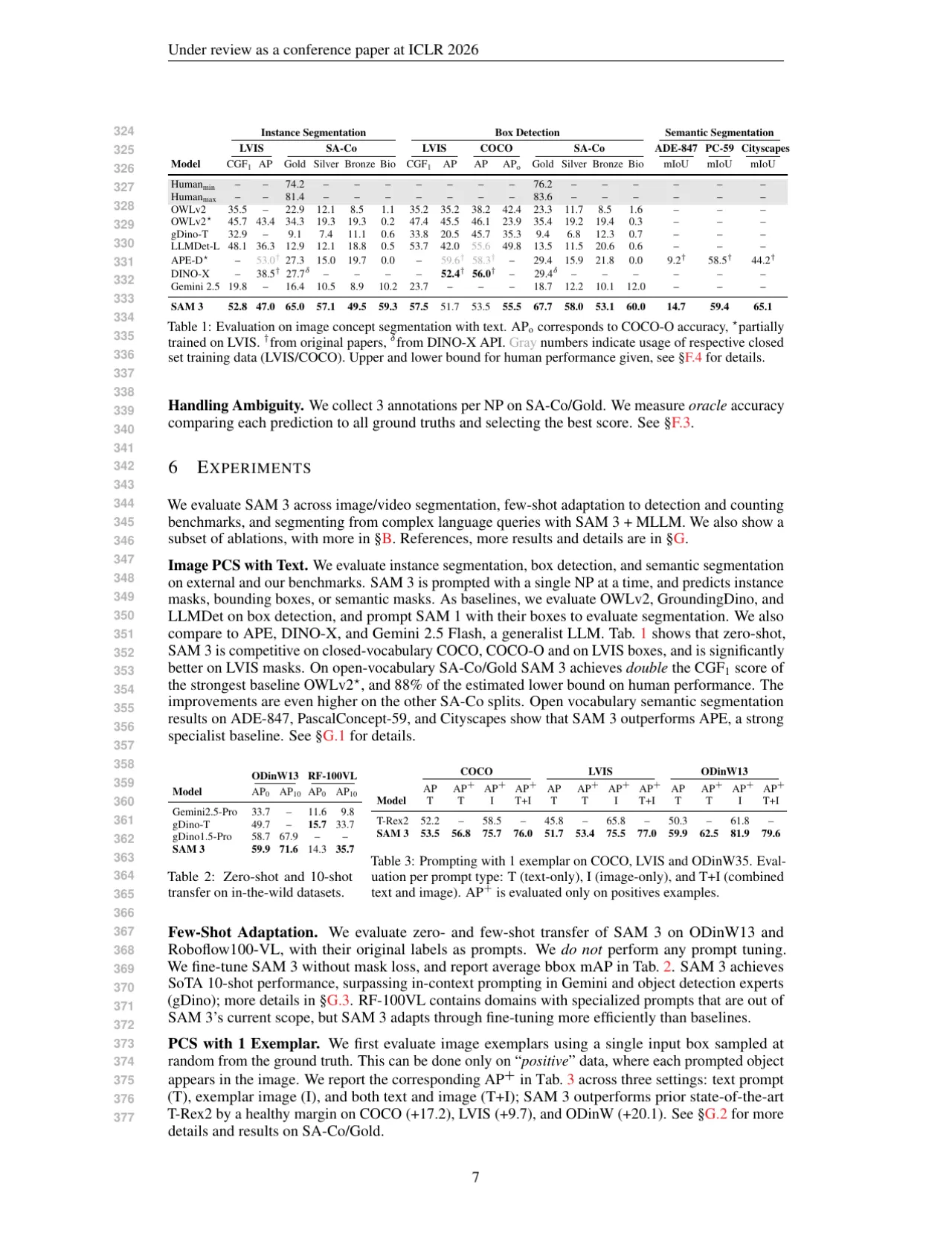
47.0LVIS zero-shot mask AP(前最优 38.5)
4MSA-Co/HQ 独特概念标签数量
30 ms单图推理延迟(100+ 检测目标,H200)
02 方法
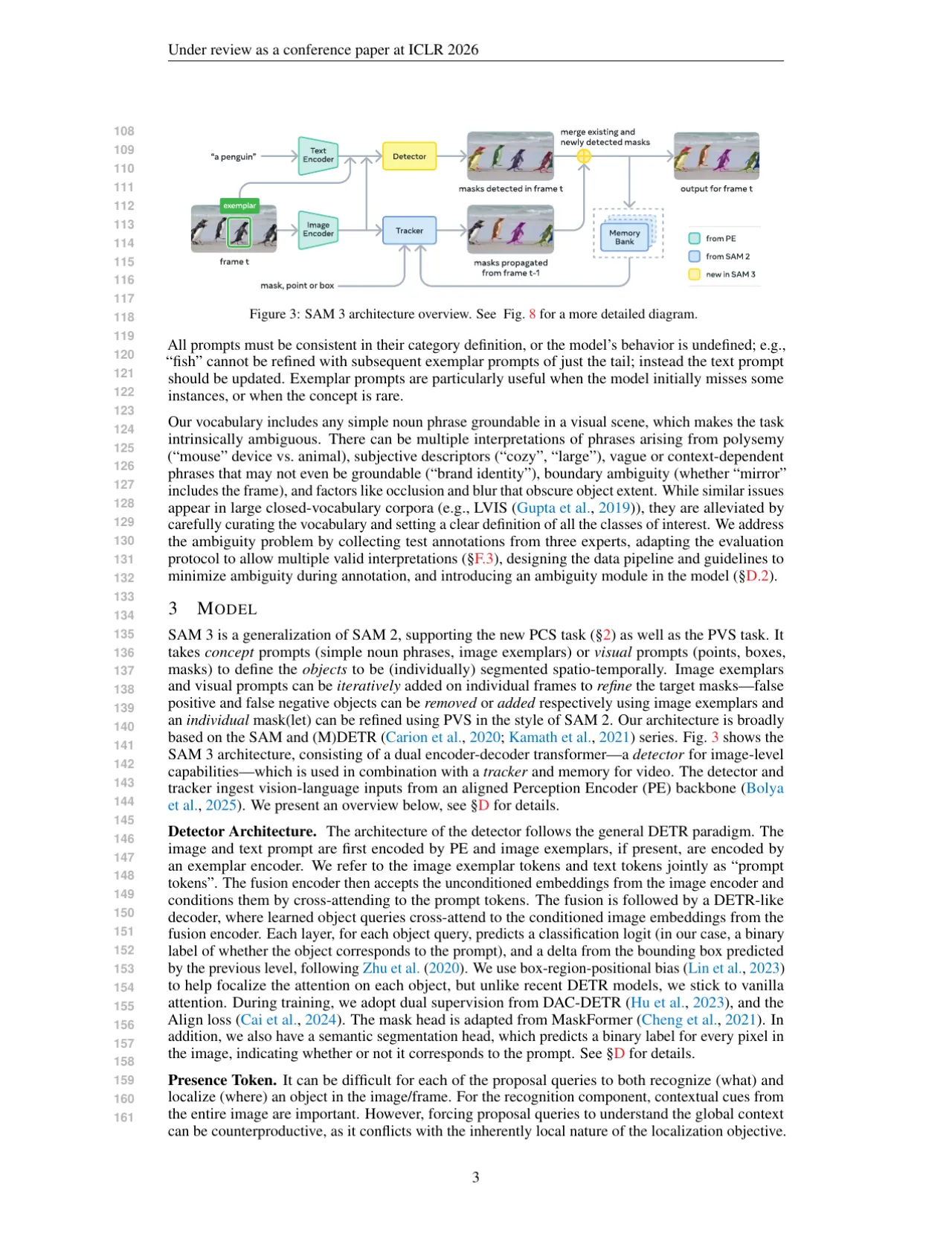
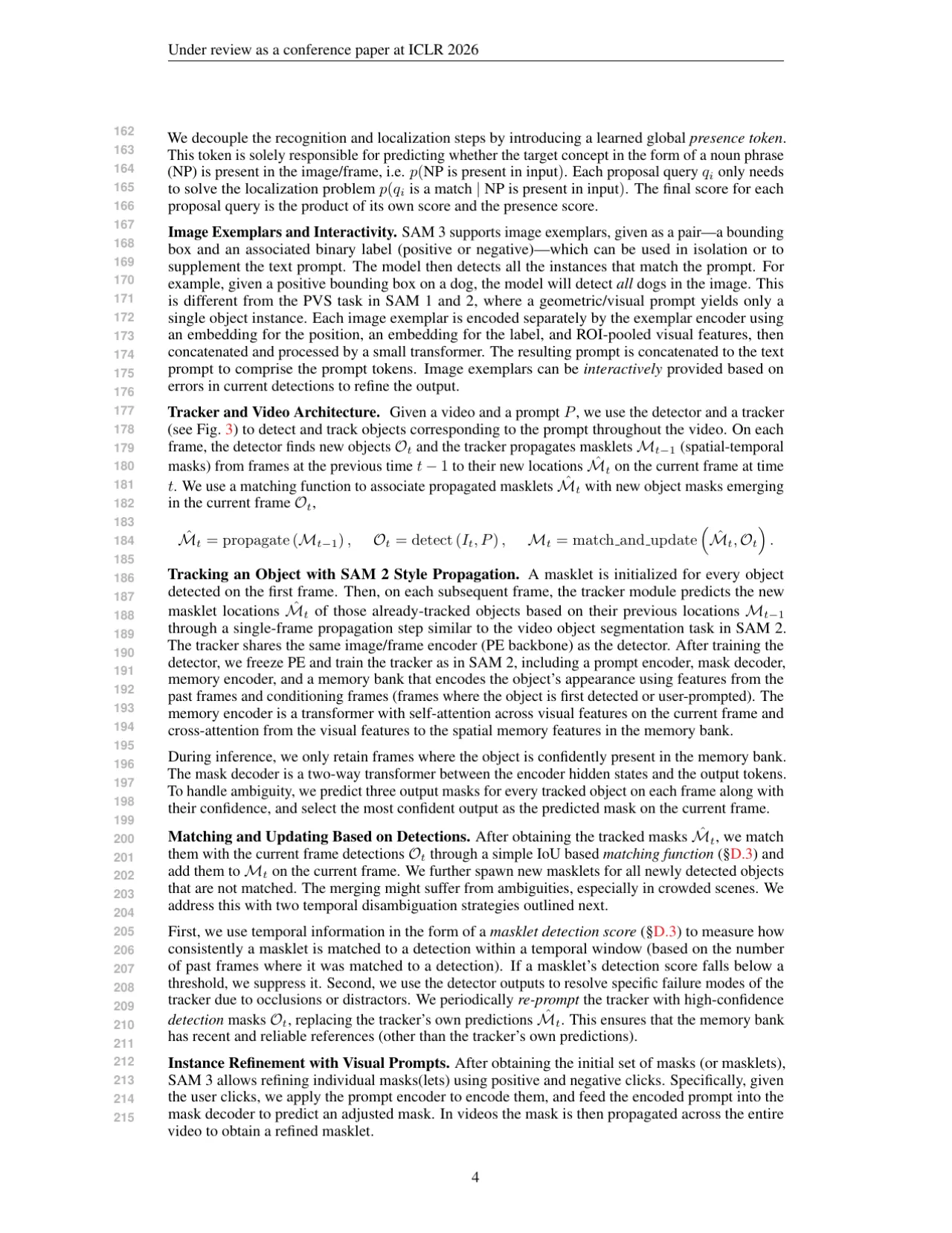
SAM 3 由共享视觉骨干网络 Perception Encoder (PE) 的 检测器(图像级)与 追踪器(内存式视频)构成。检测器基于 DETR 范式,输入文本/图像范例提示后预测所有匹配实例的分割掩码。追踪器继承 SAM 2 的 Transformer 编解码器架构,在视频中传播 masklet(时空掩码)。两者通过四阶段渐进式训练策略联合优化。
"SAM 3 struggles to generalize to fine-grained out-of-domain concepts (e.g., aircraft types, medical terms) in a zero-shot manner, especially in niche visual domains (e.g., thermal imagery)." 虽然少量微调可快速适应新概念,但零样本表现有限。
文本提示限于简单名词短语(noun phrases)
"SAM 3 is constrained to simple noun phrase prompts and does not support multi-attribute queries beyond one or two attributes or longer phrases including referring expressions." 即不直接支持复杂指代表达。与 MLLM 结合可缓解此问题,但需要外部大模型参与。
视频推理成本随追踪目标数线性增长
"The cost of SAM 3 inference scales linearly with the number of objects being tracked." 实时 30 FPS 需要多卡并行:2×H200 支持约 10 个目标,4×H200 支持约 28 个,8×H200 支持约 64 个。"There is no shared object-level contextual information to aid in resolving ambiguities in multi-object tracking scenarios."
概念级与实例级交互模式切换不连续
"Supporting concept-level interactivity for PCS, alongside instance-level interactivity for PVS, poses several challenges. To support instance-level modifications without affecting all other instances of the concept, we enforce a hard 'mode-switch' within the model from concept to instance mode." 作者指出,未来工作可以更无缝地交织概念提示与实例提示。