01 动机 Motivation
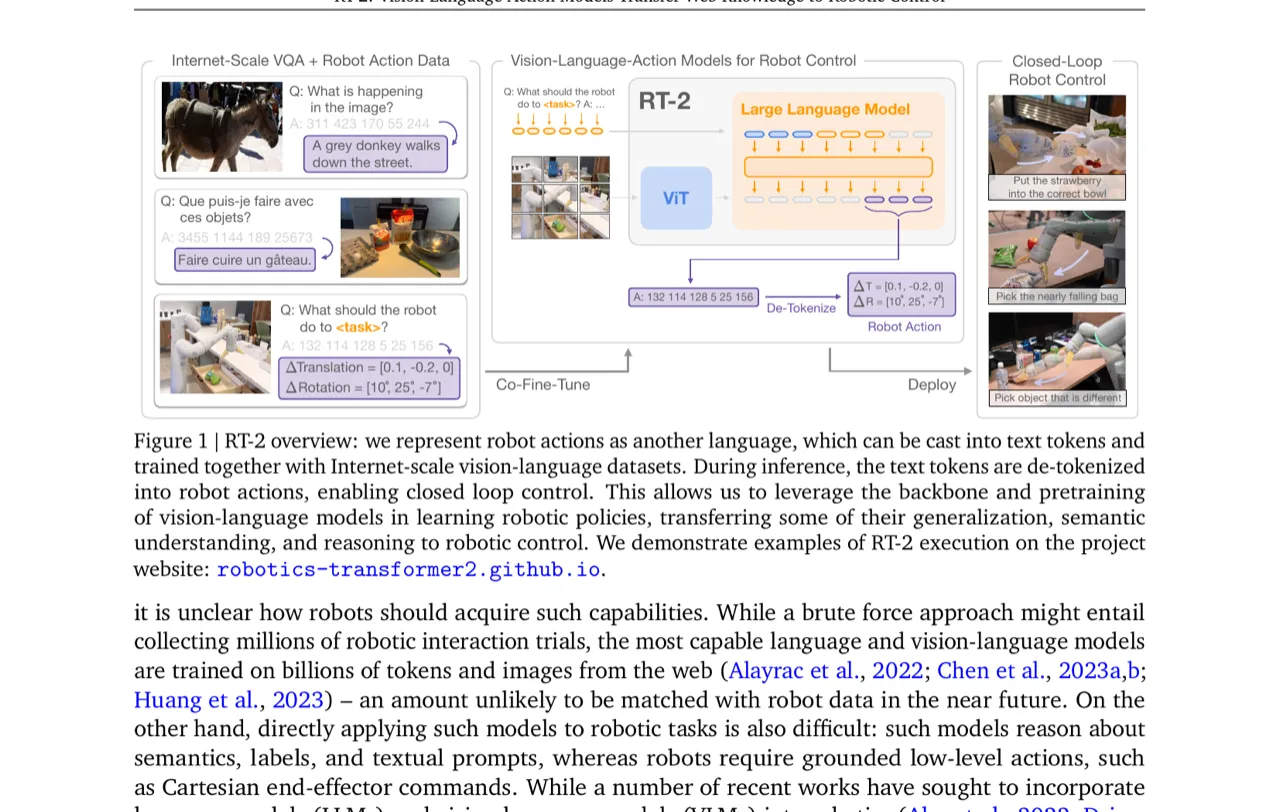
现有机器人控制方法往往将视觉-语言模型(VLM)仅用于高层规划,底层动作执行依赖独立的控制器,无法享受互联网规模预训练带来的丰富语义知识。另一方面,直接用海量机器人数据追赶 VLM 的训练量几乎不可能实现。那么,能否将大规模预训练 VLM 直接整合进闭环机器人控制,从而提升泛化能力并使突现式语义推理成为可能?
"can large pretrained vision-language models be integrated directly into low-level robotic control to boost generalization and enable emergent semantic reasoning?"
6k+真实机器人评估轨迹
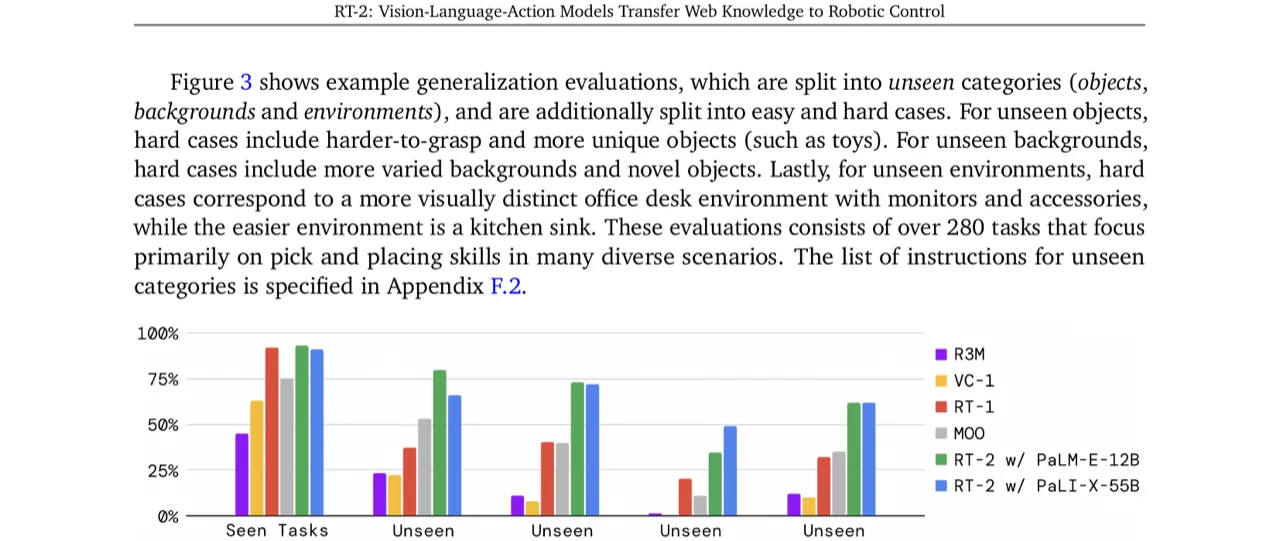
~2×泛化任务相对 RT-1/MOO 的提升
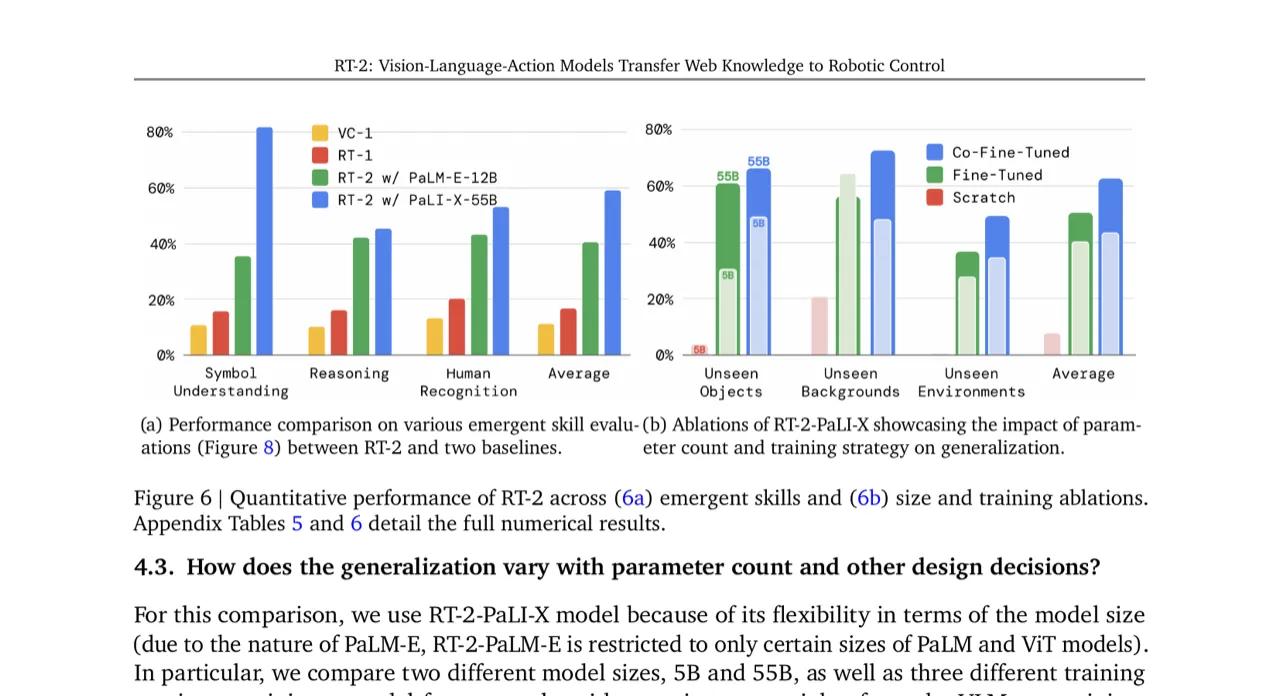
>3×突现能力相对最优基线的提升
55B最大模型参数量(PaLI-X-55B)