01 动机
数据驱动的 imitation learning 已深刻改变机器人操作领域,但现有方法受制于大规模、多样化真实演示数据的匮乏, 在长时域双臂任务与陌生环境移动操作中泛化能力依然不足。
"Data-driven imitation learning has revolutionized robotic manipulation, but existing approaches remain limited by the scarcity of large-scale, diverse real-world demonstration data, leading to insufficient generalization in long-horizon bimanual tasks and mobile manipulation in strange environments."
现有代表性数据集存在明显的单一维度局限:BridgeData V2(60K 轨迹,仅 13 项技能)、DROID(76K 轨迹,仅含单臂 Franka)、 Open X-Embodiment(数据聚合,无触觉)。即便是最新的 AgiBot World(1M 轨迹)和 Galaxea Open-World(50K), 也均依赖单一机器人本体,严重制约跨本体泛化研究。RoboCOIN 虽含 15 种本体,但每种本体的任务覆盖稀疏。 RoboMIND 2.0 是首个同时支持双臂协调、移动操作、灵巧手与高保真触觉传感的开放数据集。
310K+双臂操作轨迹
759复杂任务 / 129 项技能
6异构机器人本体
1,139操作对象种类
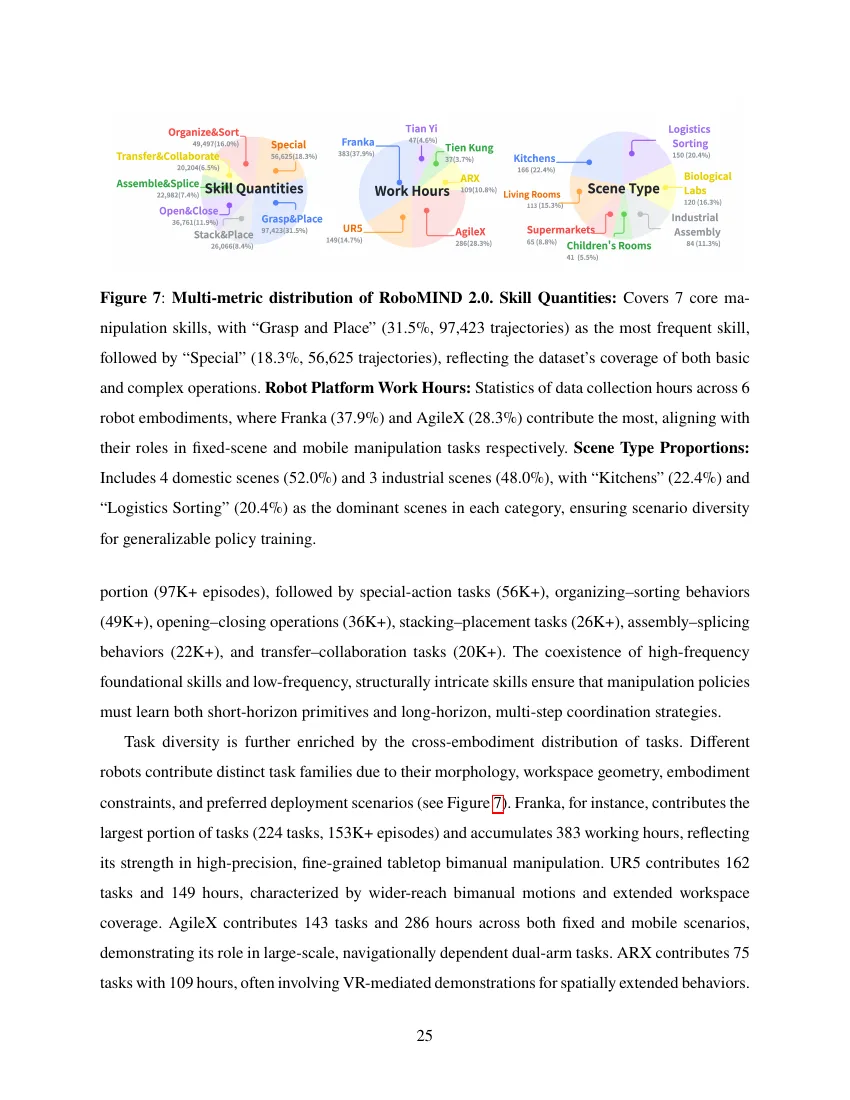
在任务类型上,"Grasp and Place" 占比最高(31.5%,97,423 条轨迹),其次为 "Special"(19.8%)、 "Interactive"(19.3%);场景覆盖家庭(客厅、厨房、儿童房)与工业(物流分拣、生物实验室、工业装配线) 各约 50%,真正实现了机器人研究所需的多维度多样性。