01 动机 Motivation
通用机器人操作策略的训练需要大量多样化、高质量的示范数据。然而现有数据集普遍存在规模有限、机体单一、采集标准不统一等问题,严重制约了策略的泛化能力。
"Unlike language or vision datasets that can often be sourced through web-based collection methods, collecting robotic data is difficult because each robot requires controlled environments where the joints and end-effector information of robotic systems are meticulously recorded."
此前大多数工作仅专注于单一机器人类型(如 Open X-Embodiment 以单臂为主),任务多样性和跨机体迁移能力严重受限。RoboMIND 提出了一套统一数据采集与标注流程,汇聚 4 类机体的真实遥操作数据,并额外收录失败案例和仿真数字孪生,以满足当代大模型训练的数据需求。
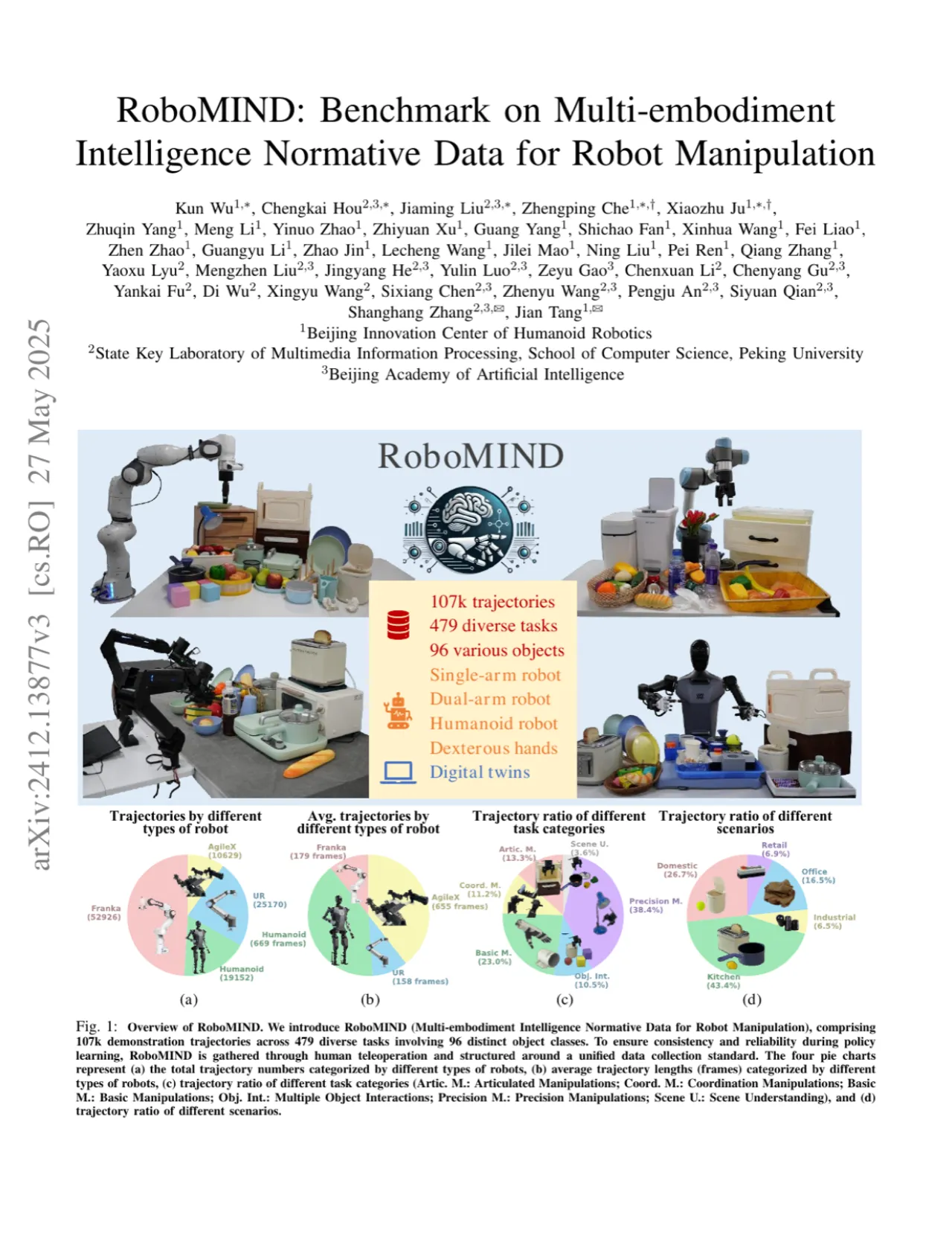
107k示范轨迹总数
479多样化任务种类
96物体类别
5k真实失败轨迹
与现有工作相比,RoboMIND 的优势体现在:(1) 覆盖的任务和机体类型最多;(2) 采集标准统一,数据质量可控;(3) 提供失败轨迹以支持 Reinforcement Learning from Human Feedback (RLHF) 类研究;(4) 提供 Isaac Sim 数字孪生环境,支持合成数据生成与策略评测。论文 Table I 与 Open X-Embodiment、BridgeData V2、RoboSet、DROID 等代表性数据集进行了详细对比。