01 动机 · Motivation
双臂协作操作(bimanual manipulation)是机器人迈向通用操作能力的关键一步,却面临严重的数据瓶颈:现有数据集大多针对单一机器人平台、任务类型单一、缺乏高质量标注,且规模远不足以支撑大模型预训练。
"Existing datasets are often limited in scale, diversity, or quality, failing to capture the breadth of bimanual manipulation tasks required for general robot learning."
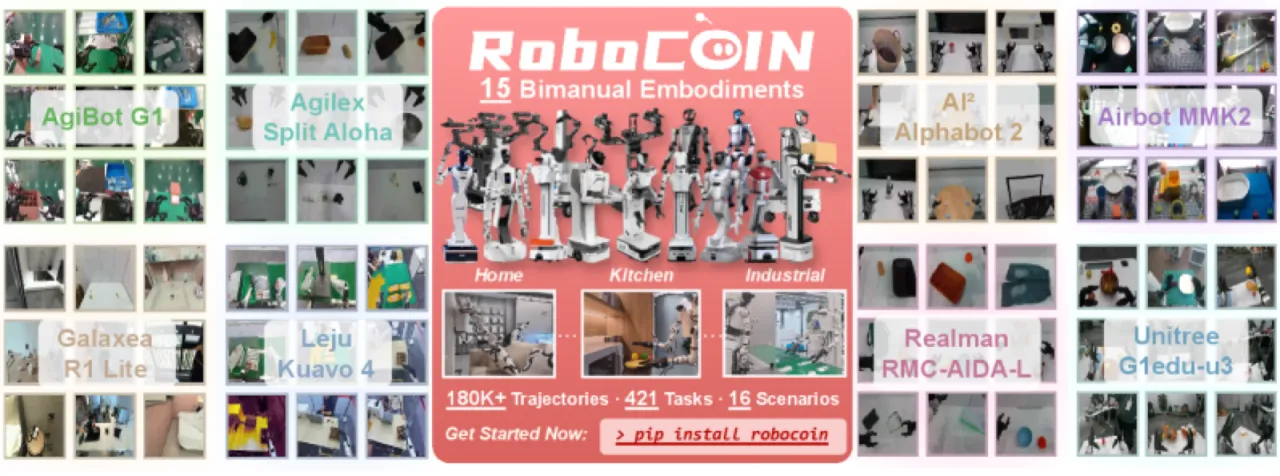
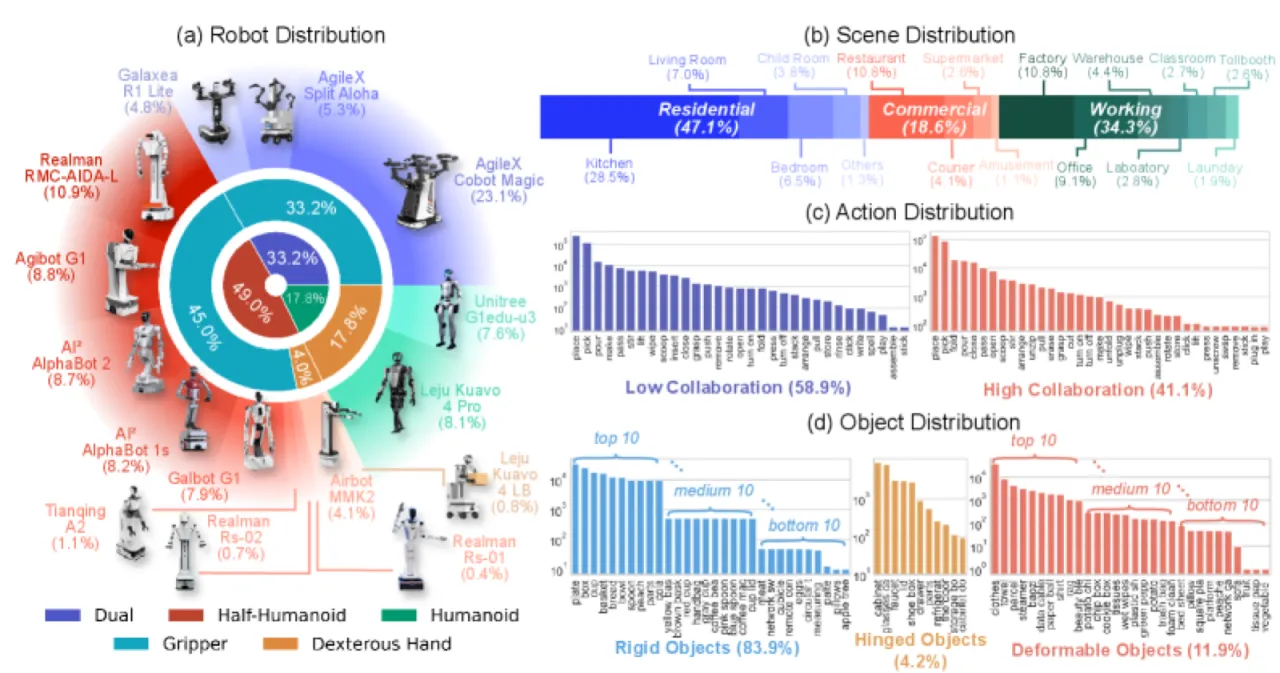
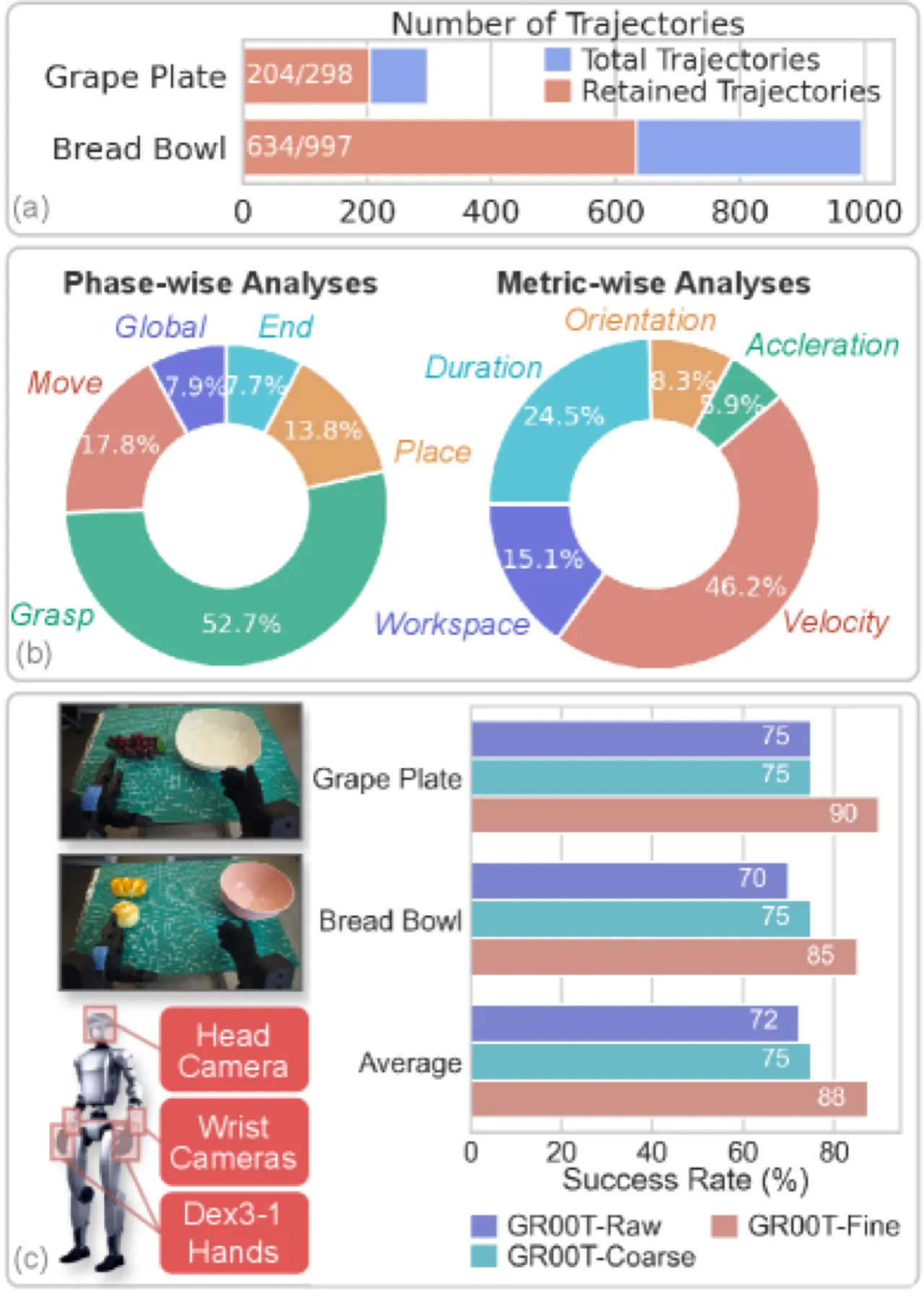
180K+高质量示教轨迹
421双臂操作任务
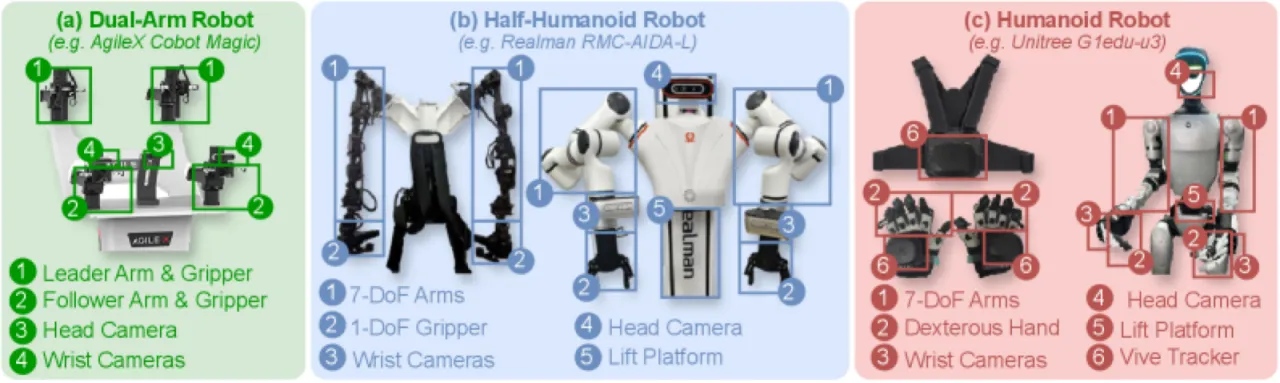
15机器人平台
432操作对象类别
为什么需要 RoboCOIN?
- 规模不足:现有双臂数据集最多仅有数千条轨迹,与单臂数据集的百万级规模差距巨大。
- 平台单一:跨本体(cross-embodiment)泛化研究缺乏覆盖多种硬件形态的统一数据集。
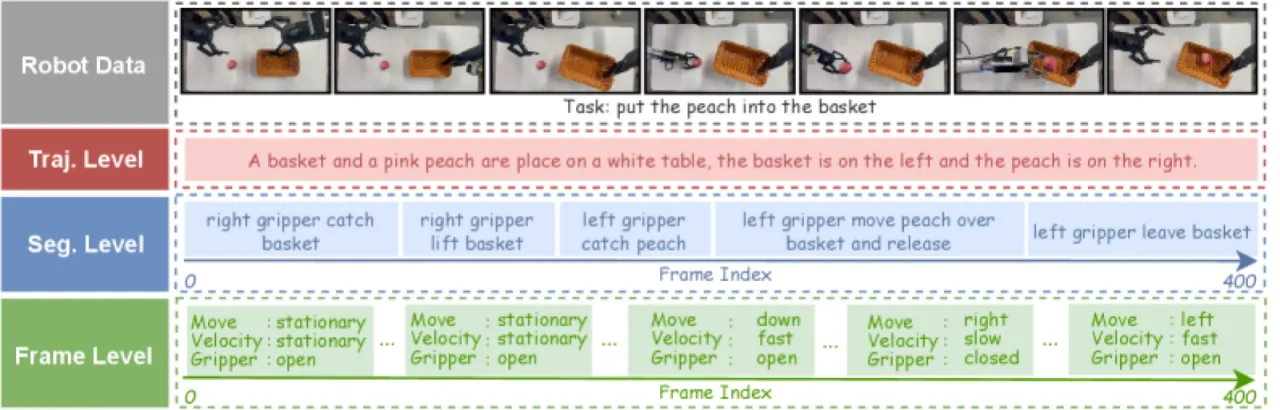
- 标注缺失:现有数据集大多仅有低层关节状态,缺乏语义级别的分层标注,难以支持需要精细推理的策略学习。
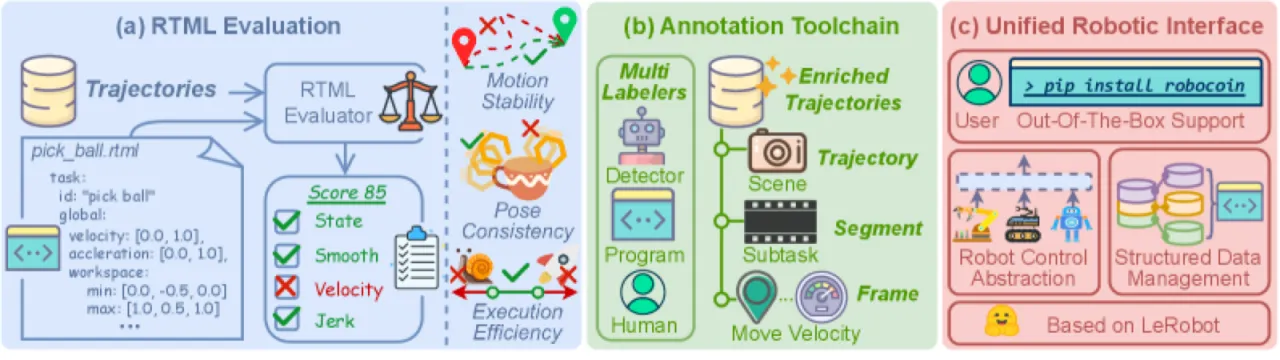
- 质量良莠不齐:遥操作本身会引入操作员偏差,缺乏系统性的数据质量过滤机制。