01 动机 Motivation
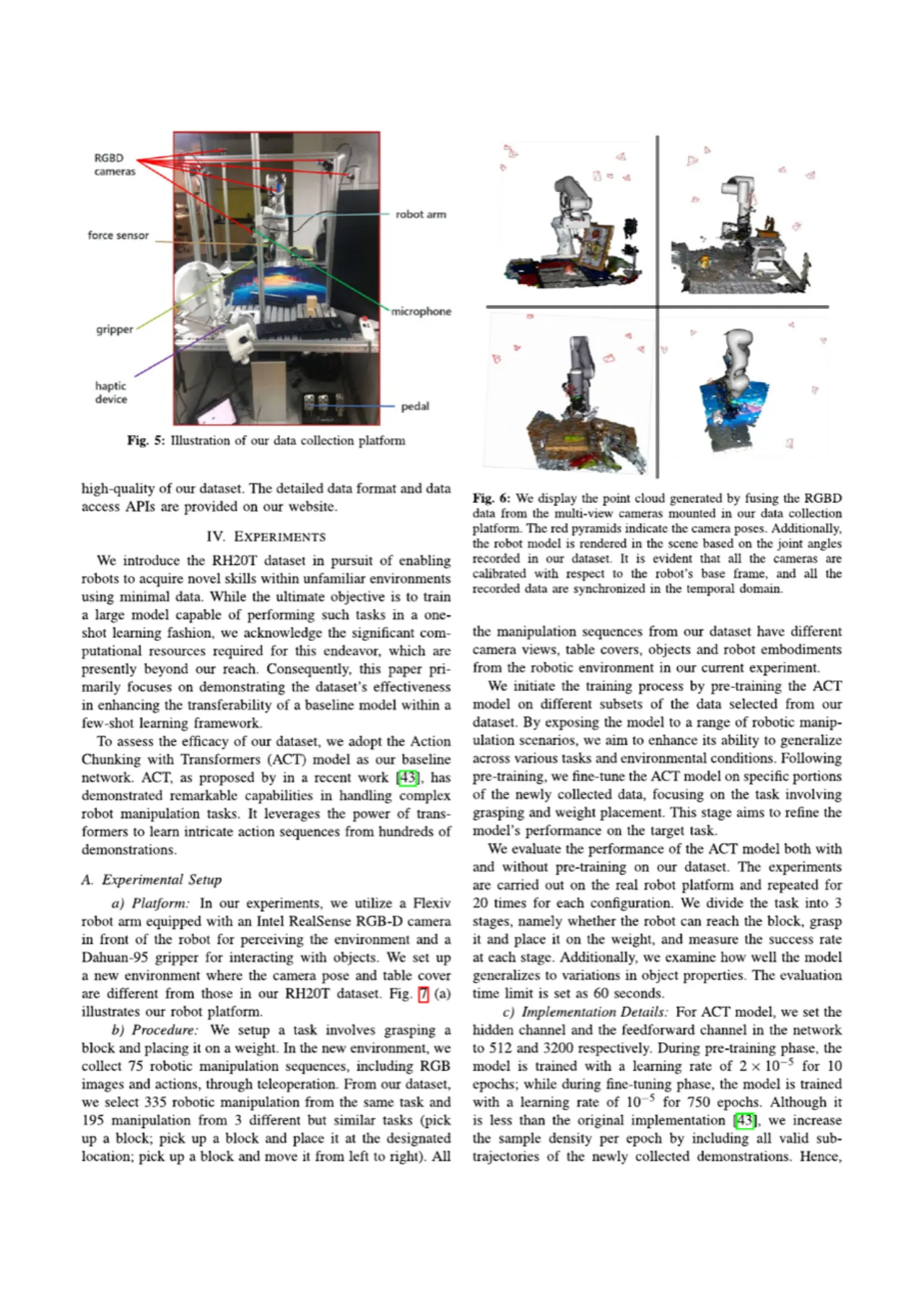
现有机器人操控研究主要停留在推送(push)、抓取(pick-place)等简单任务,且几乎仅依赖视觉(visual-only)反馈。然而现实中许多操控技能高度依赖力觉与触觉——如切割、旋转、插拔等 contact-rich 动作。造成这一差距的核心瓶颈有两个:(1)缺乏大规模多样化的真实机器人数据集;(2)现有方法忽略了视觉之外的多模态感知。
"In reality, there are many complex skills, some of which may even require both visual and tactile perception to solve. This paper aims to unlock the potential for an agent to generalize to hundreds of real-world skills with multi-modal perception."

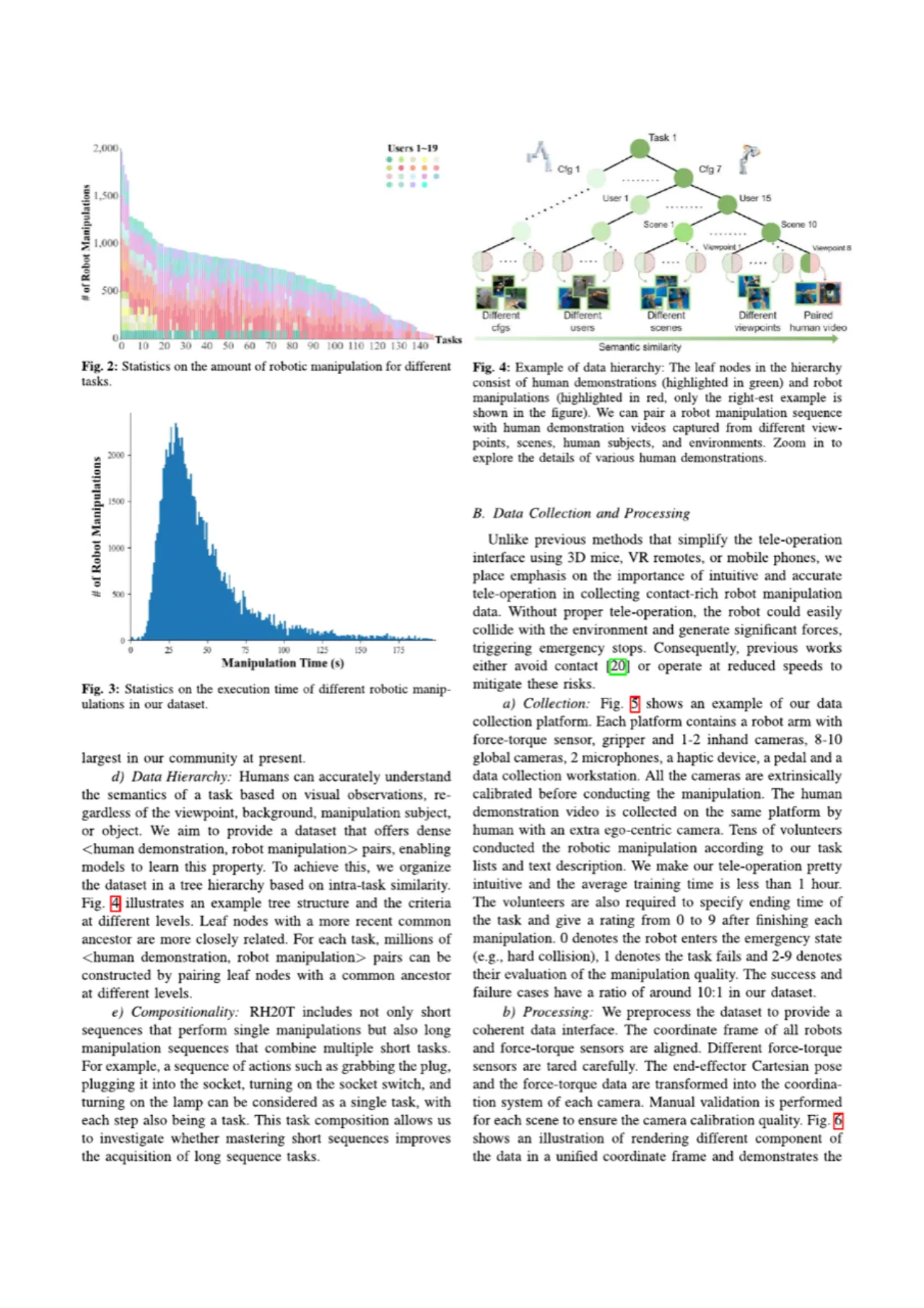
110K+机器人操控序列
110K+对应人类示范视频
50M+总图像帧数
147任务 / 42 种技能
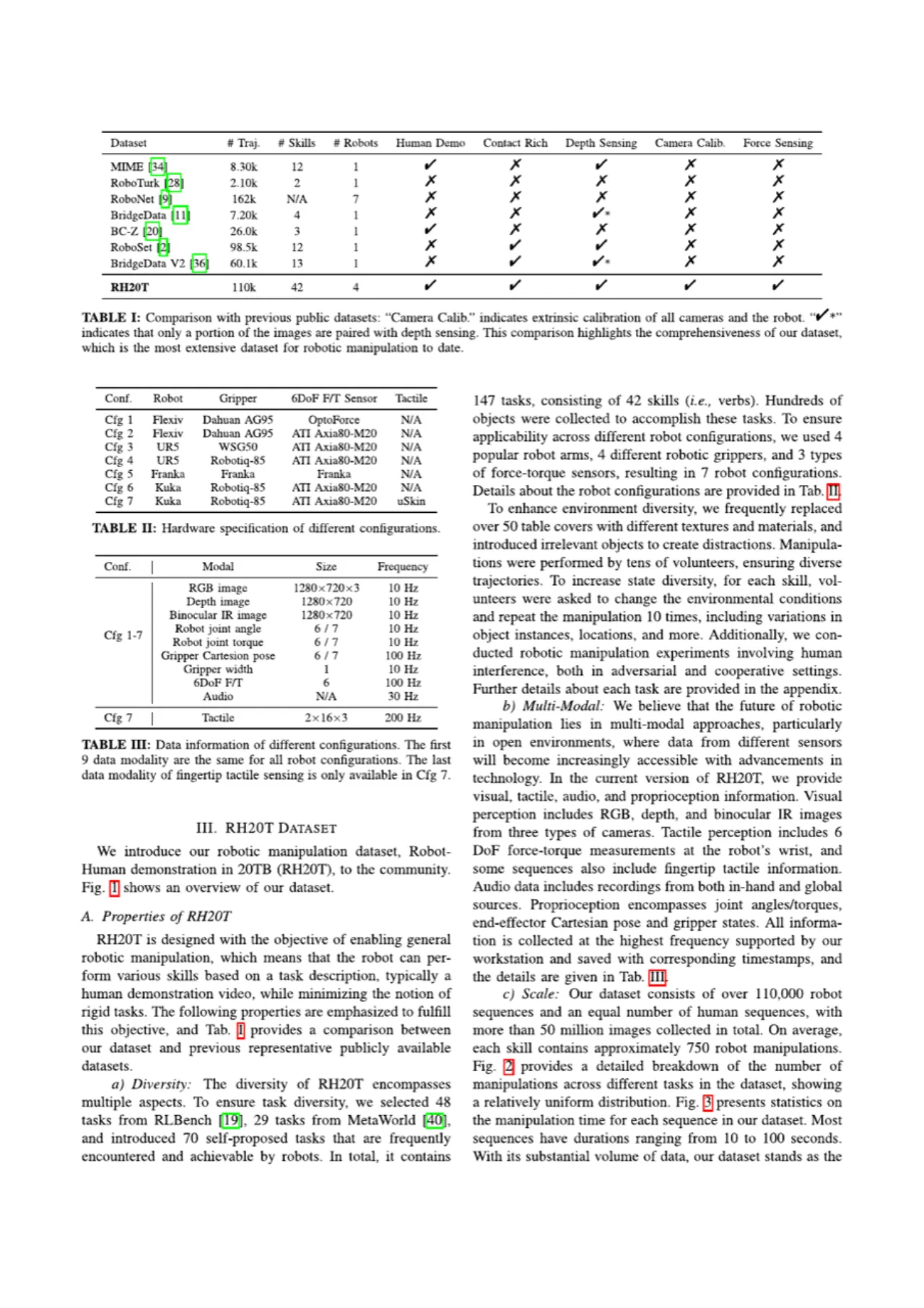
与同类公开数据集的对比凸显了 RH20T 的全面性:MIME(8.3K 条)、RoboTurk(2.1K 条)、RoboNet(162K 条,但多为随机游走)、BC-Z(60.1K 条,技能单一)均无法同时覆盖多机器人、力觉感知、相机标定与人类示范等维度。RH20T 是目前社区中规模最大、模态最丰富的真实世界机器人操控数据集。