"The robot is {robot_tag} with {single arm / dual arms}[, waist][, and mobile base]. The control frequency is {FPS} Hz. Please predict the next {chunk_size} control actions to execute the following task: {ori_instruction}."
所有任务输出均表示为 Y ∈ RH×K(H 为预测视野,K 为共享通道维度)。操作任务(∆EEF、关节角度、夹手状态)和导航任务(∆x, ∆y, ∆θ 航点)均占据 Y 的前 c ≤ K 个通道,其余通道零填充,由二值掩码 M ∈ {0,1}H×K 屏蔽填充项对梯度的影响。这使单一 DiT 参数集可处理所有控制模式。
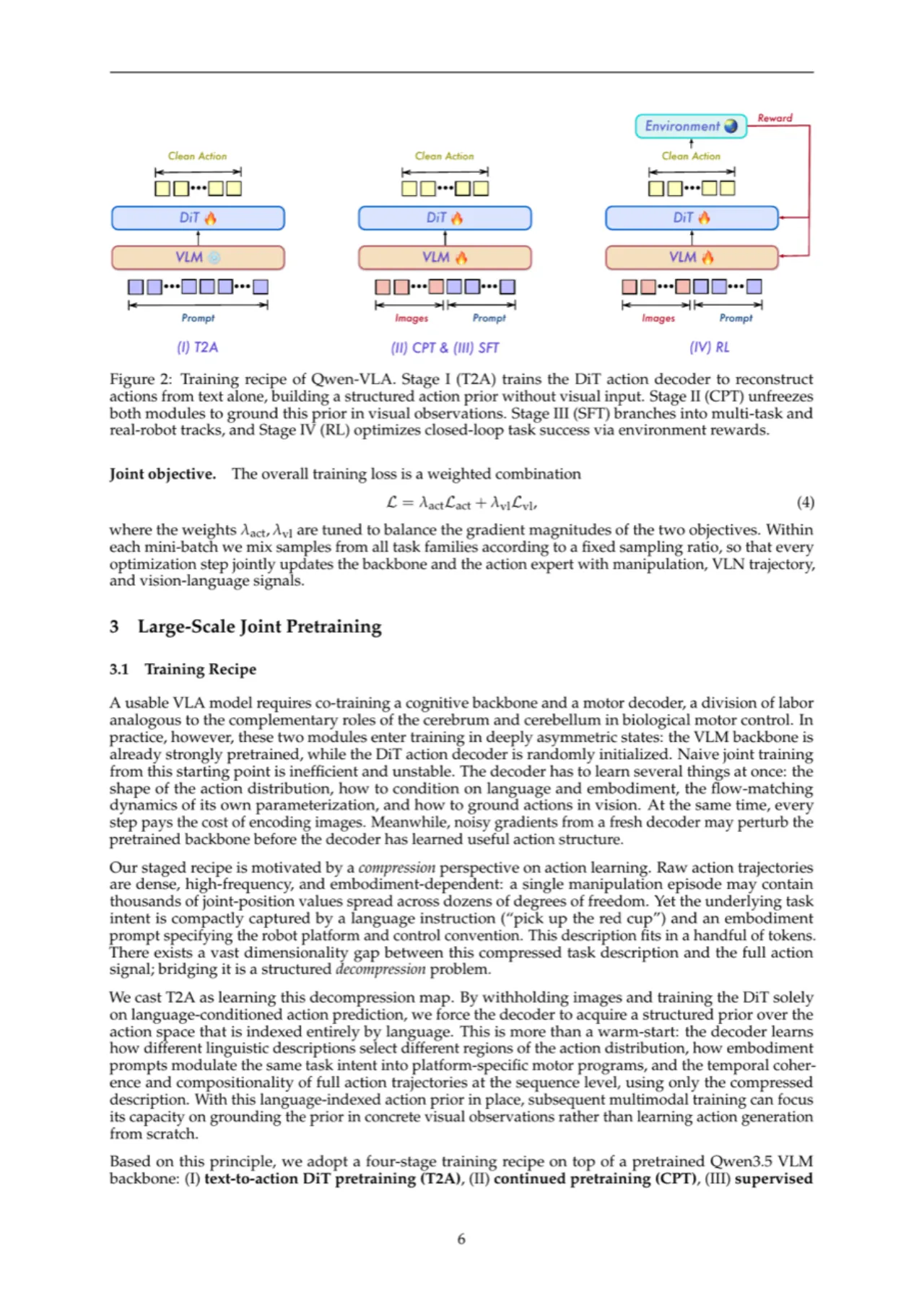
四阶段渐进训练
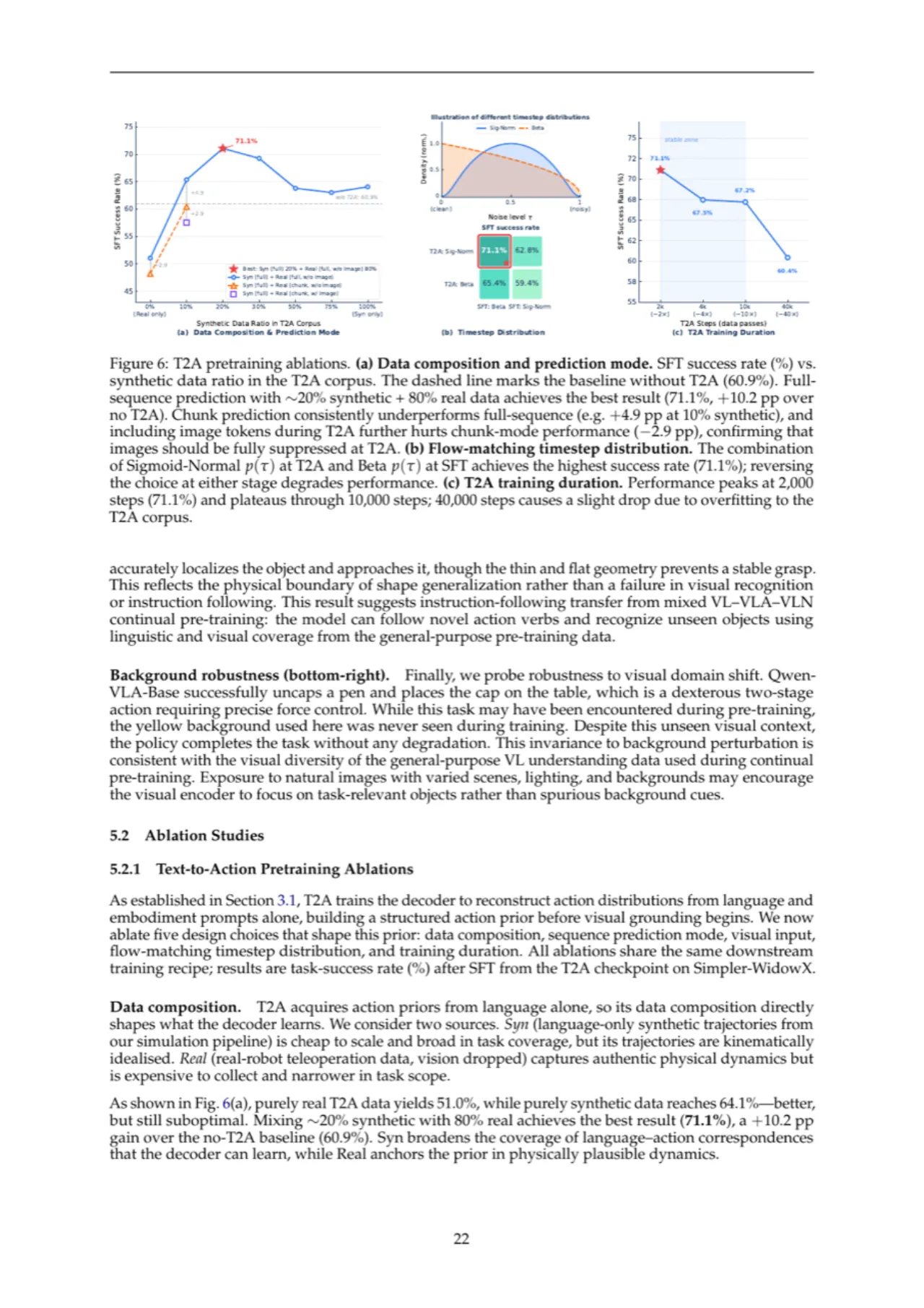
Stage I — T2A(Text-to-Action 预训练):冻结 VLM,仅训练 DiT,刻意屏蔽图像,迫使解码器从紧凑的语言描述中重建高维动作分布,建立语言索引的动作先验。最优配置:∼20% 合成 + 80% 真实数据,全序列预测,Sigmoid-Normal 时间步分布,2,000 步,较无 T2A 基线提升 +10.2 pp(71.1% vs. 60.9%)。
Stage II — CPT(持续预训练):解冻两个模块,在包括机器人操作轨迹(74.2%)、人类第一视角演示(6.0%)、导航数据(7.5%)、合成仿真数据(3.7%)和辅助视觉-语言数据(8.5%)的混合语料上训练,使骨干适应具身感知。
Note:以下三点均为论文第 7 节(Limitations and Future Work)作者明确陈述(stated),非推断。
具身动作数据规模与多样性不足
"Embodied action data remains far smaller and less diverse than vision-language pretraining data, limiting robustness to long-tail objects, environments, embodiments, and contact-rich interactions."——长尾物体、接触丰富的交互(如布料折叠、精细插接)仍是薄弱环节。
多任务联合训练的优化权衡
"Joint training across vision-language understanding, navigation, and action generation introduces optimization trade-offs. While action-oriented training improves policy learning, it can modestly regress some pure vision-language and navigation evaluations, suggesting the need for better objective balancing, data curricula, and modular specialization."——动作学习与语言理解之间存在梯度竞争,需要更好的目标平衡和数据课程。
评估仍以短视野、基准驱动为主
"Current evaluations are still largely short-horizon and benchmark-driven, leaving long-duration, failure-prone real-world deployment as an open challenge."——长时程规划、失败恢复、开放世界真机部署仍是未解决的挑战。未来方向包括情节记忆、世界模型预测、力觉/触觉等更丰富的物理反馈。