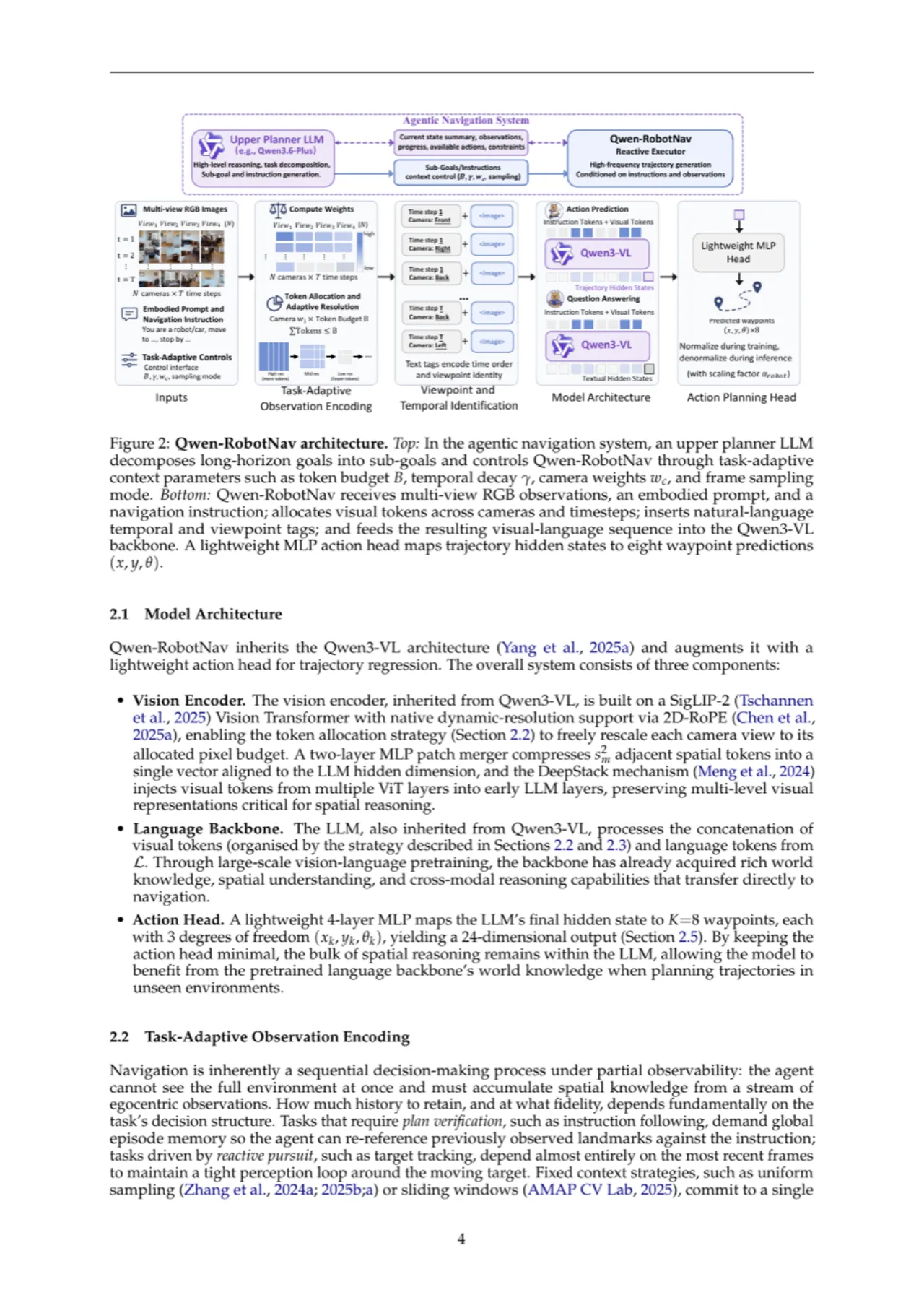
多相机、多时间步的视觉 token 在输入 LLM 前本质上是不可区分的。
Qwen-RobotNav 在每个时间步组前插入自然语言标签(如 Time step 1 Front View <image> Right View <image> ...),
完全依赖 Qwen3-VL 已有的词汇理解能力,无需额外参数或嵌入,同时保留了开放世界语言先验。
Embodiment-Aware Prompt Design
不同物理平台(室内移动机器人 vs. 自动驾驶汽车)通过系统提示中的自然语言前言区分:
室内机器人以 "Imagine you are a robot programmed for navigation tasks" 开始,
自动驾驶以 "Imagine you are a car programmed for autonomous driving" 开始。
支持新平台仅需定义新提示模板,无需任何架构修改。
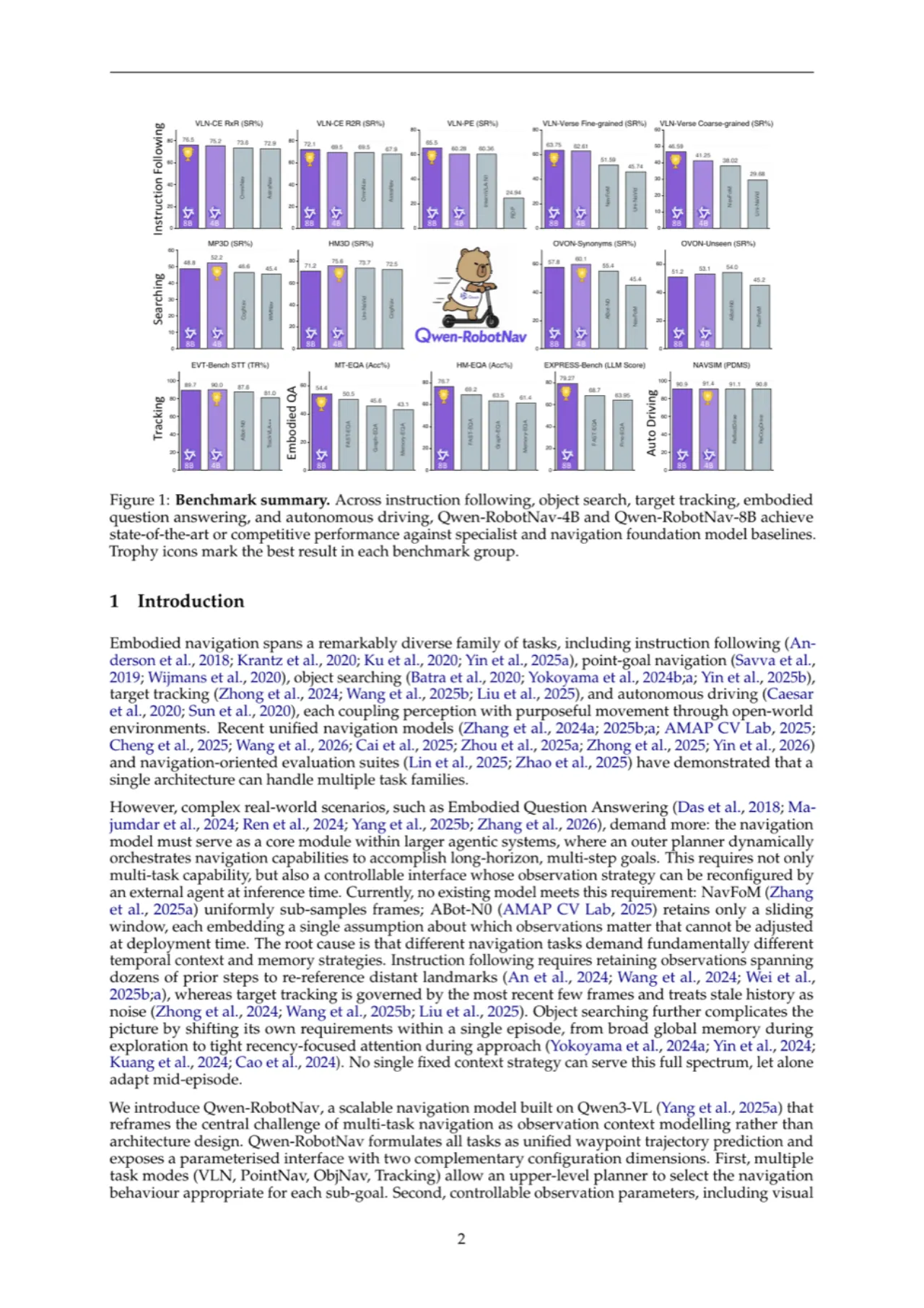
EVT-Bench 上追踪率(TR)最高,但成功率(SR)低于专项追踪器 ABot-N0(77.4% vs. 86.9%)和 TrackVLA++(77.4% vs. 86.0%)。
论文原文:"We hypothesise that the broader multi-task training of Qwen-RobotNav introduces a trade-off where the model maintains tighter following behaviour (superior TR) while being more conservative in declaring episode success."
路径效率(SPL)低于专项探索模型(作者在 ObjNav 分析中指出)
HM3D-OVON 上,Qwen-RobotNav 的 SPL 低于 NavFoM 和 ABot-N0,反映骨架探索训练轨迹倾向于逐房间系统性搜索(提高目标发现率),但路径更长。
论文原文:"The lower SPL of Qwen-RobotNav relative to NavFoM and ABot-N0 reflects a reach-first exploration behaviour."
论文原文:"We believe this strategy could be further improved by a more principled token allocation algorithm."
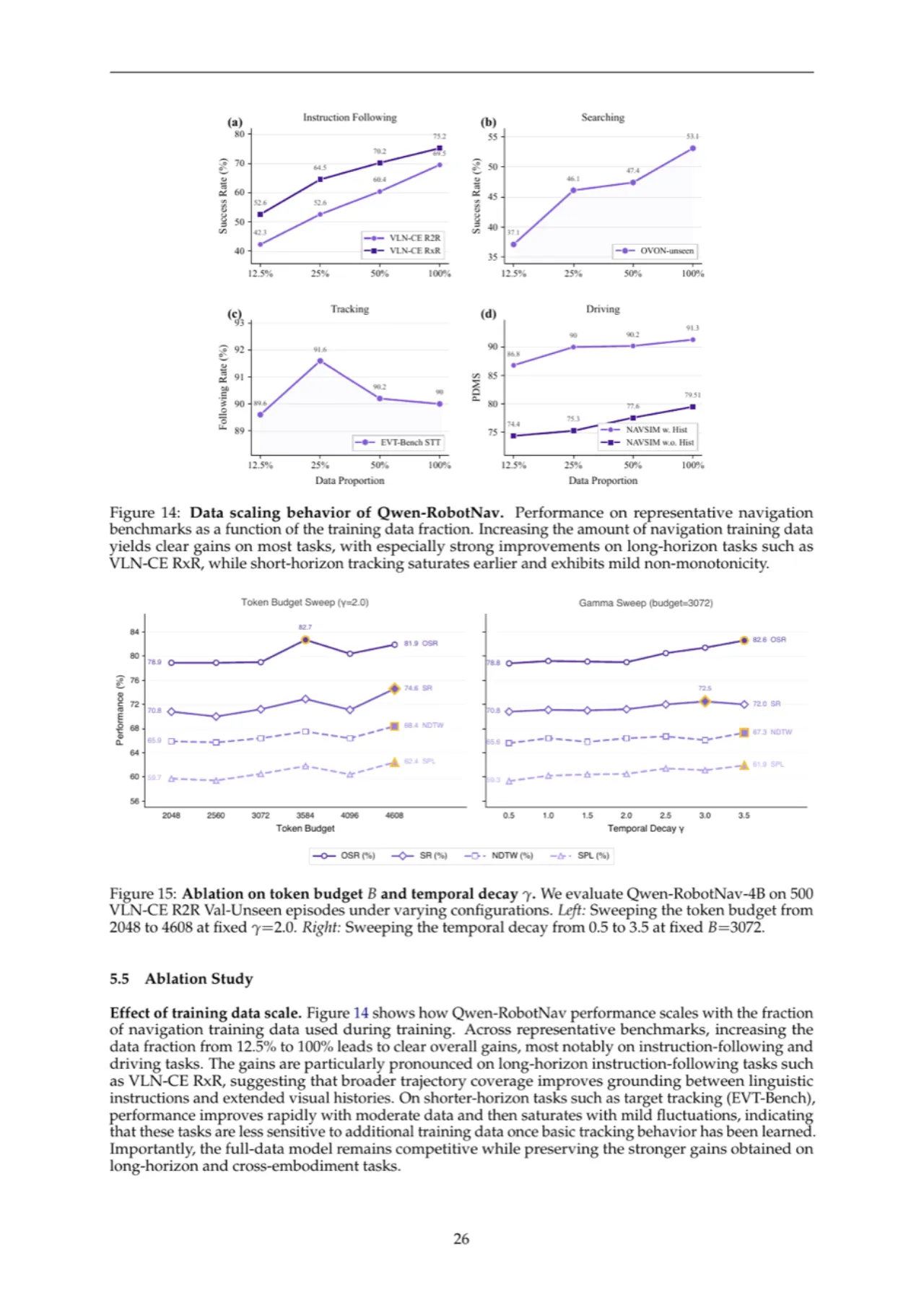
当前 token 预算分配基于经验启发式,并非最优;消融实验也显示过大预算带来收益递减甚至略有下降。