01 动机(Motivation)
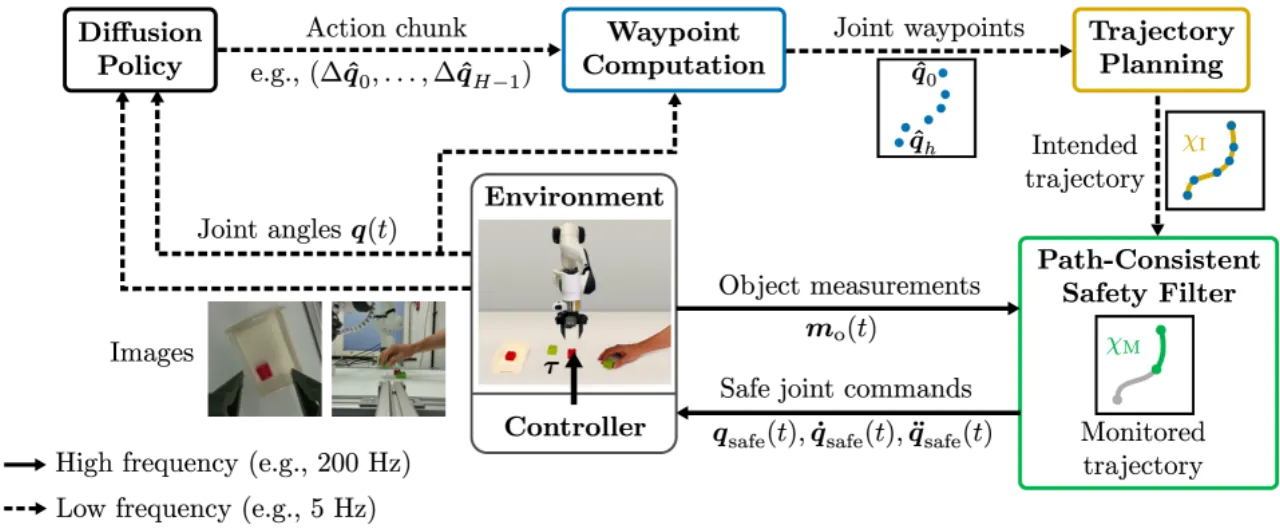
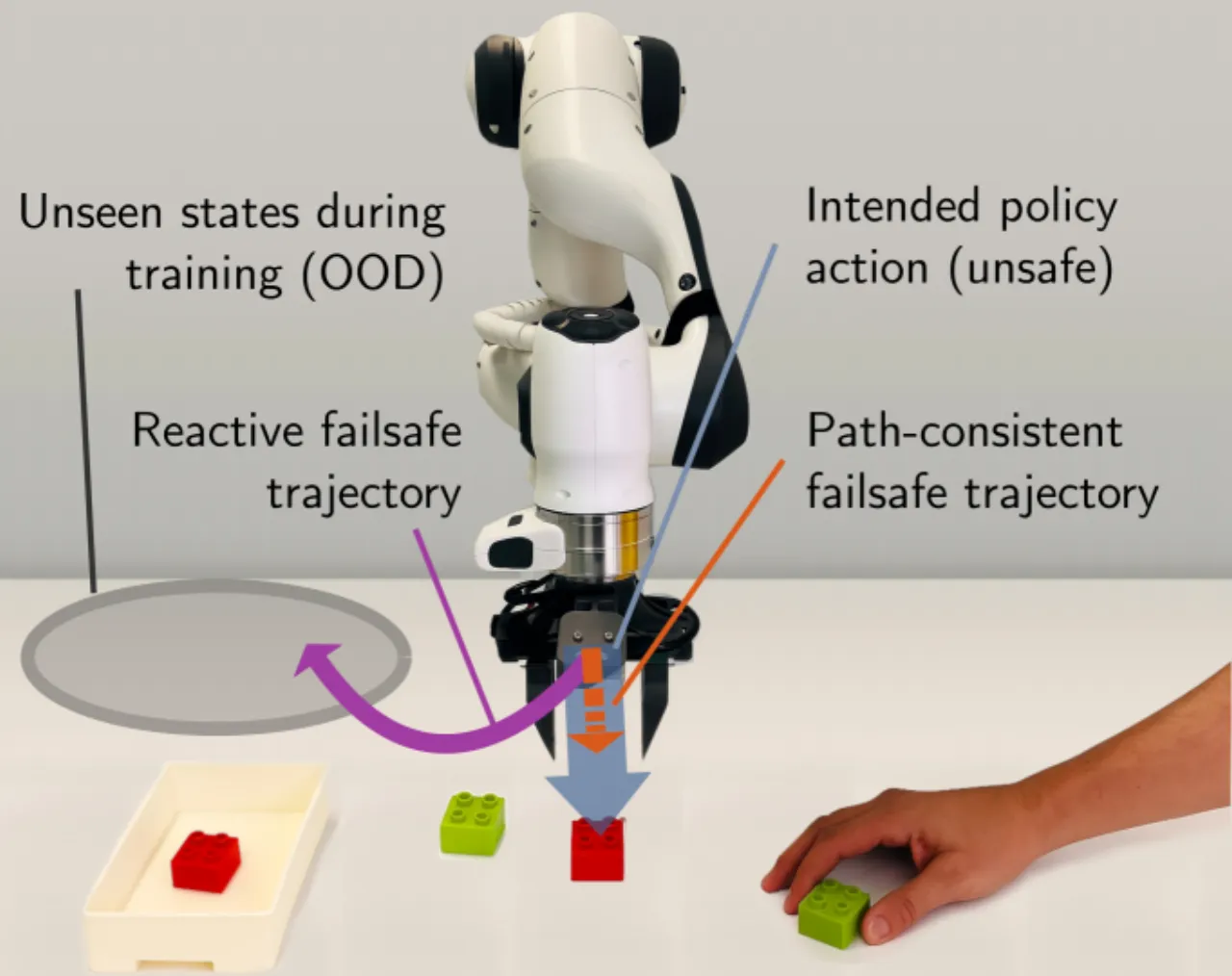
Diffusion Policy 在复杂操作任务上表现出色,但由于其随机采样特性,无法保证安全行为,必须依赖外部安全机制。现有反应式安全过滤器(如 Control Barrier Functions,CBF)在阻止危险动作的同时,会将机器人推入训练分布之外的状态,导致后续行为不可预测、任务失败。
"Diffusion policies cannot guarantee safe behavior, requiring external safety mechanisms."
69%仿真平均任务成功率(PACS PFL)
4%CBF 仿真平均成功率(对比)
80%真实硬件平均安全任务成功率
0%安全违规率(PACS 启用时)