01 动机
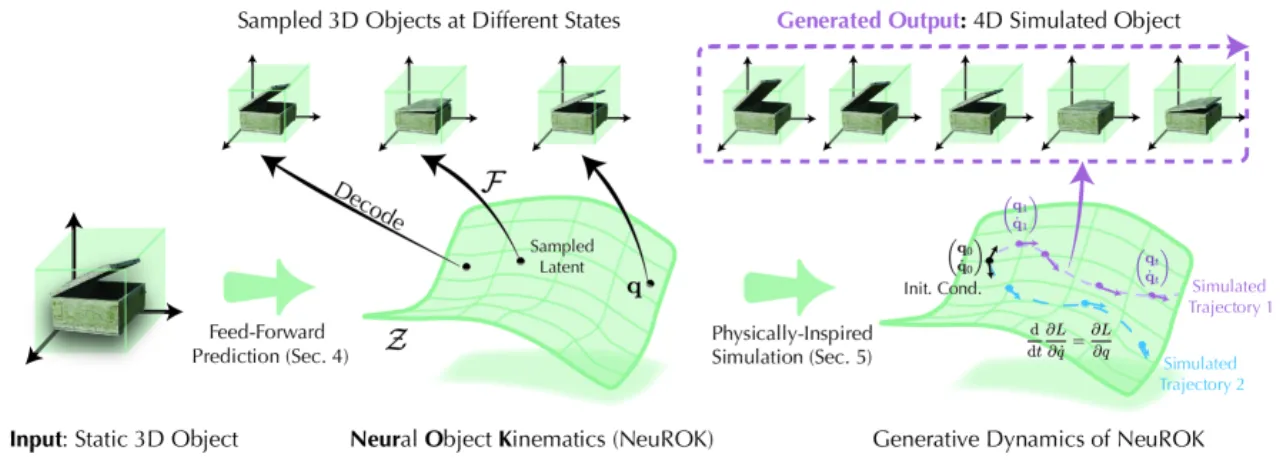
现有的 4D 动态生成方法大多依赖预定义的物理模型,通过系统辨识估计参数——这将方法局限于特定类别,且难以扩展到大规模数据。NeuROK 的核心洞见是:通过学习"数据驱动的运动学状态参数化",可以突破这些限制。
"Given a 3D geometric snapshot of a dynamic object, humans can intuitively imagine how the object would react under different physical conditions, even without precise knowledge of the governing physical equations."
为什么现有方法不够?
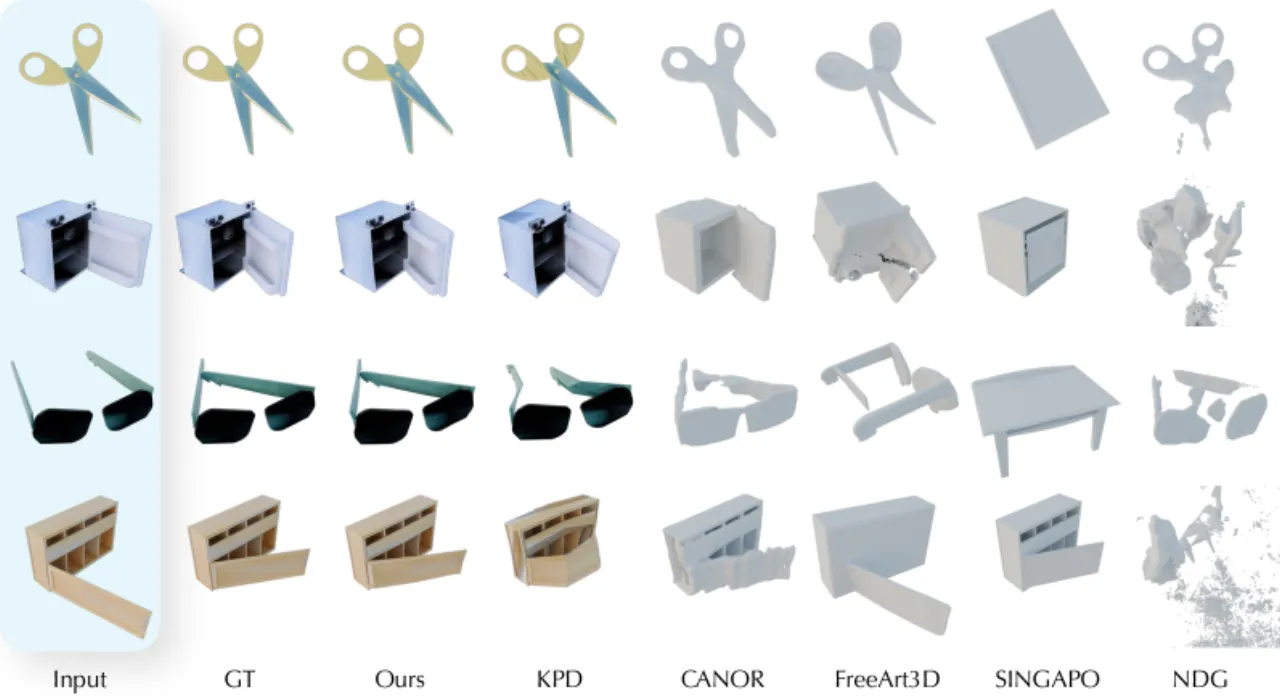
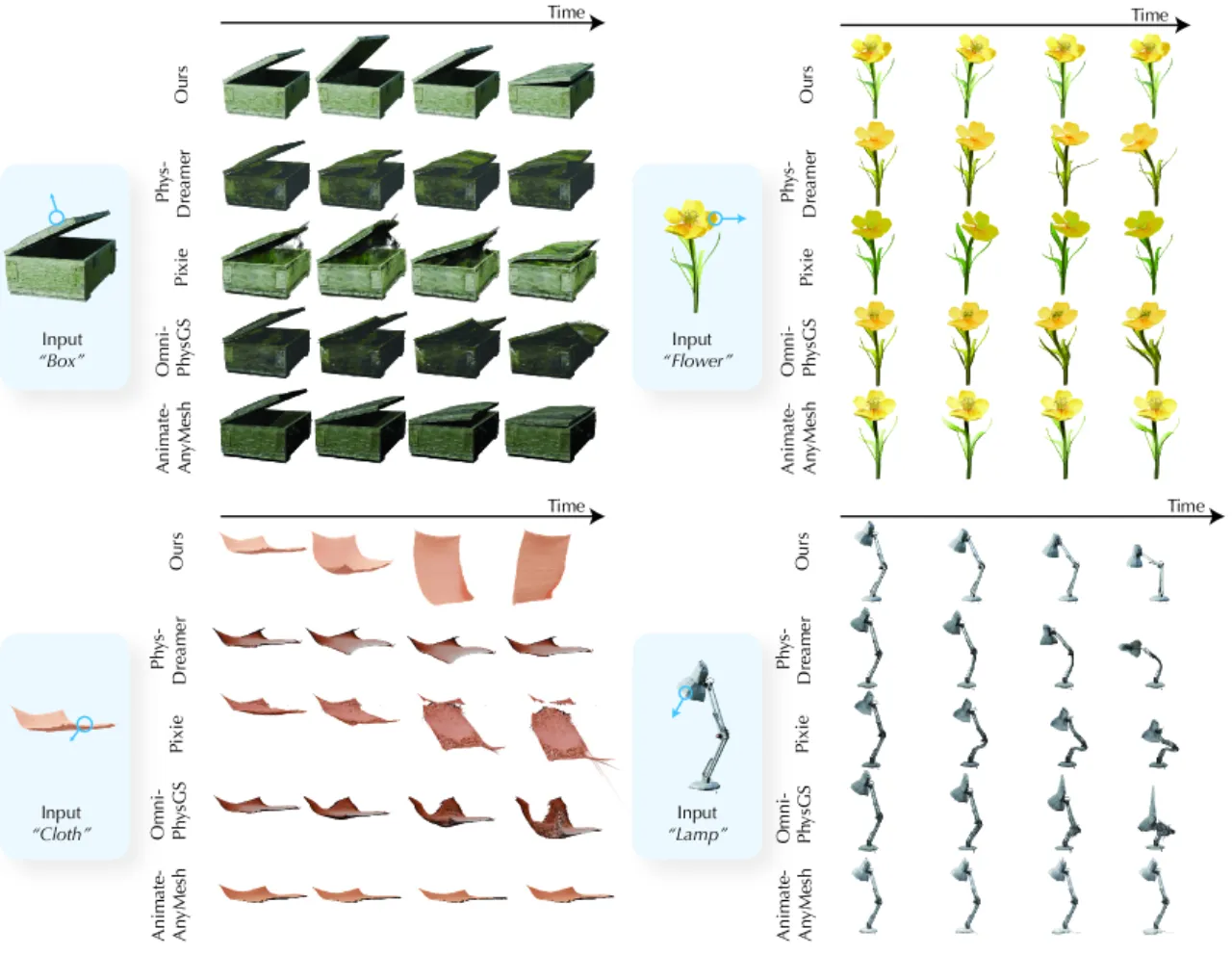
- 类别受限: 现有方法(如 PhysDreamer、OmniPhysGS)通常假设特定物理模型(如弹性体或高斯溅射),无法跨类别泛化。
- 需要物理标注: 基于"系统辨识"的方法需要对每类物体估计质量、刚度等物理参数,难以大规模部署。
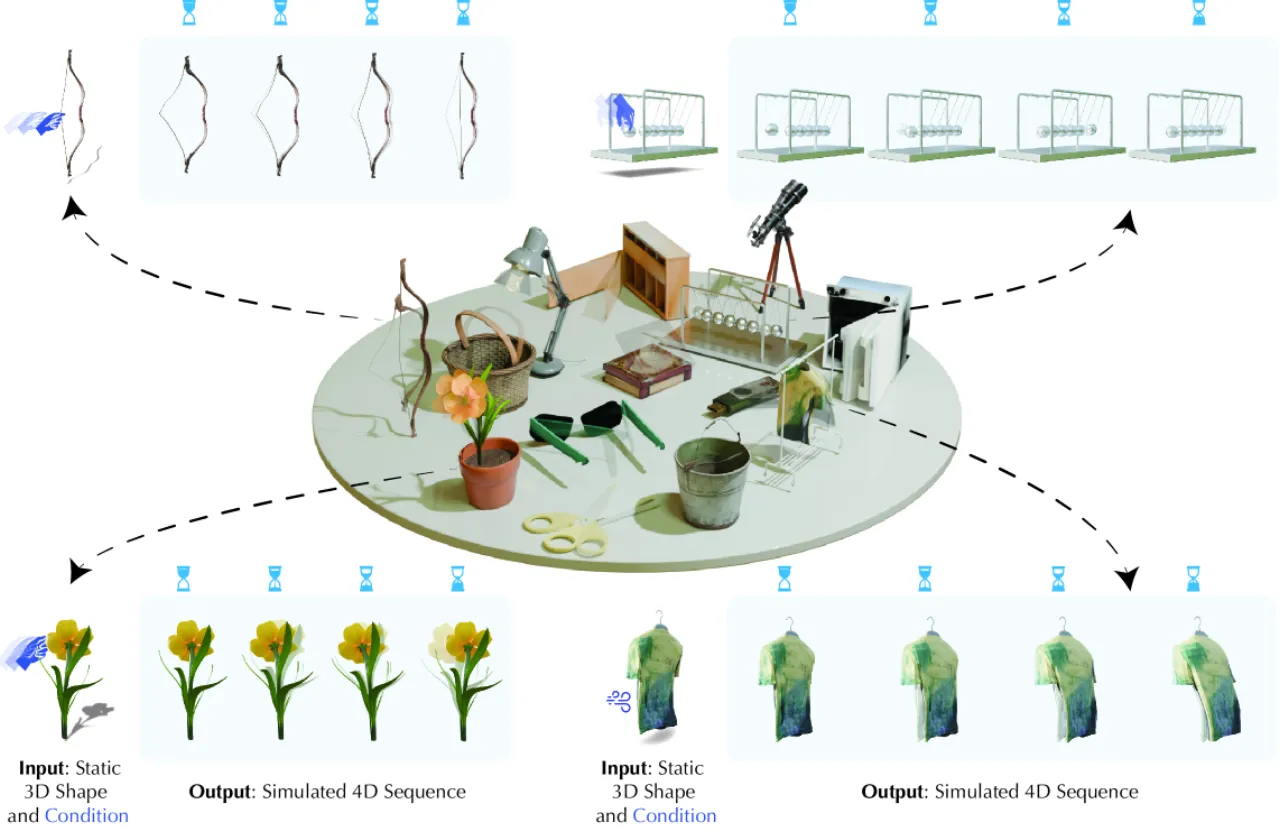
- 缺乏通用性: 铰接体、布料、连续体等物体的物理行为差异极大,统一建模是一大挑战。
81.4%用户研究偏好率(动作对齐,105人)
83.3%用户研究偏好率(运动真实性,105人)
0.764逆运动学 IoU(超越次优方法 +34%)
2.343WorldScore MM(次优方法为 0.889)