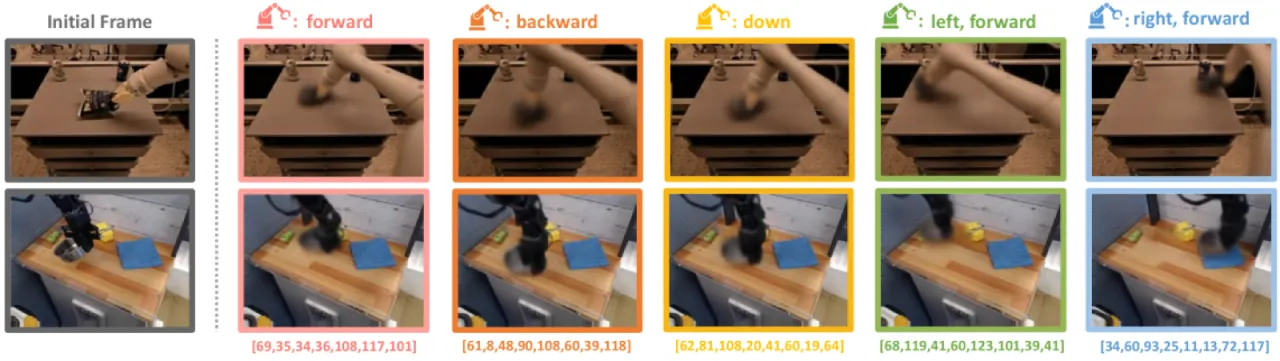
论文指出:"While we currently mainly use robot videos to train the Latent Motion Tokenizer, the learned latent motion tokens demonstrate the potential to produce consistent visual motions across varied contexts and embodiments." 将 Tokenizer 扩展到更大规模、更多样的人类操作视频是关键的未来方向,有望显著扩大可用预训练数据量。
预训练规模与微调优化仍有较大提升空间
"Future work could scale up pre-training video data and optimize fine-tuning to improve model performance on downstream robot tasks further." 当前实验受限于数据量和计算资源,预训练与微调的协同优化策略尚未充分探索。
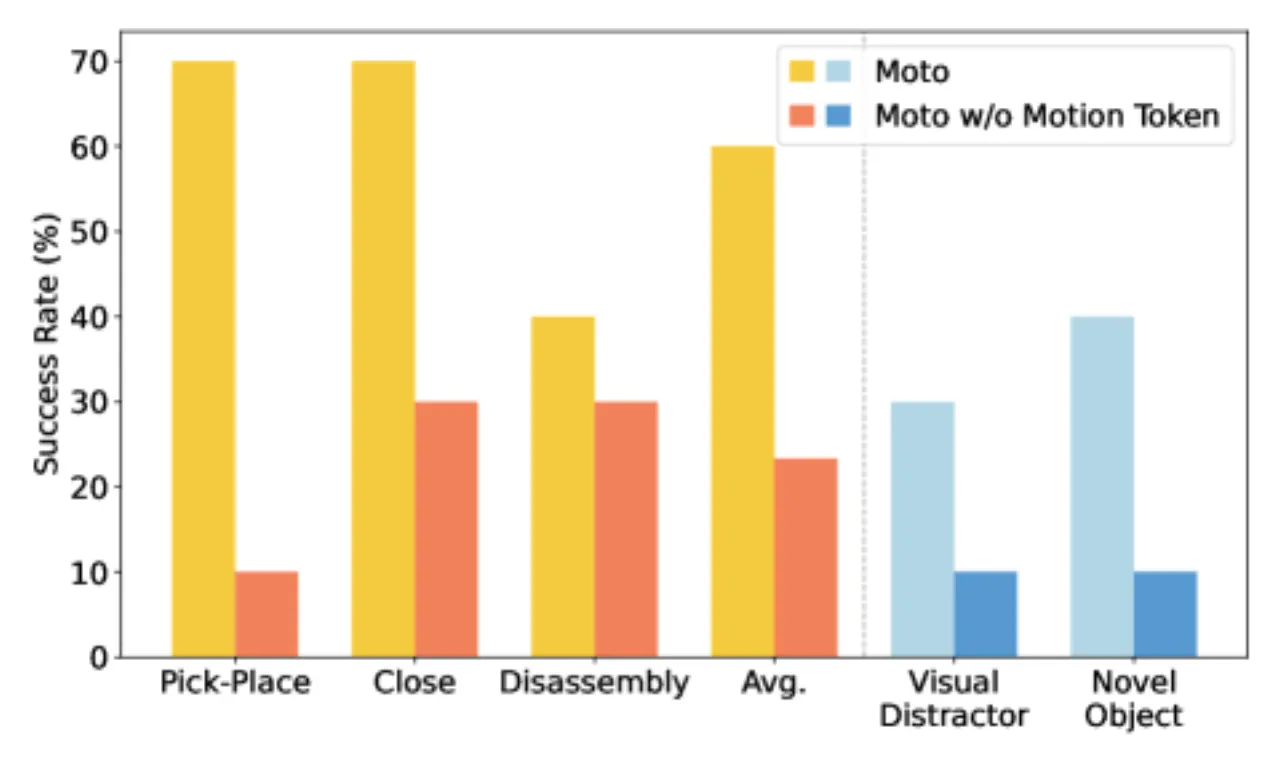
应用场景目前集中于操控(manipulation),导航与运动控制尚未验证
"Future research could explore Moto's use in improving the robustness of reinforcement learning agents and extending its application to a wider range of robotic tasks, such as navigation and locomotion, to develop a more versatile robot action policy." Moto 作为奖励模型和环境模拟器的潜力也尚待验证。