01 动机
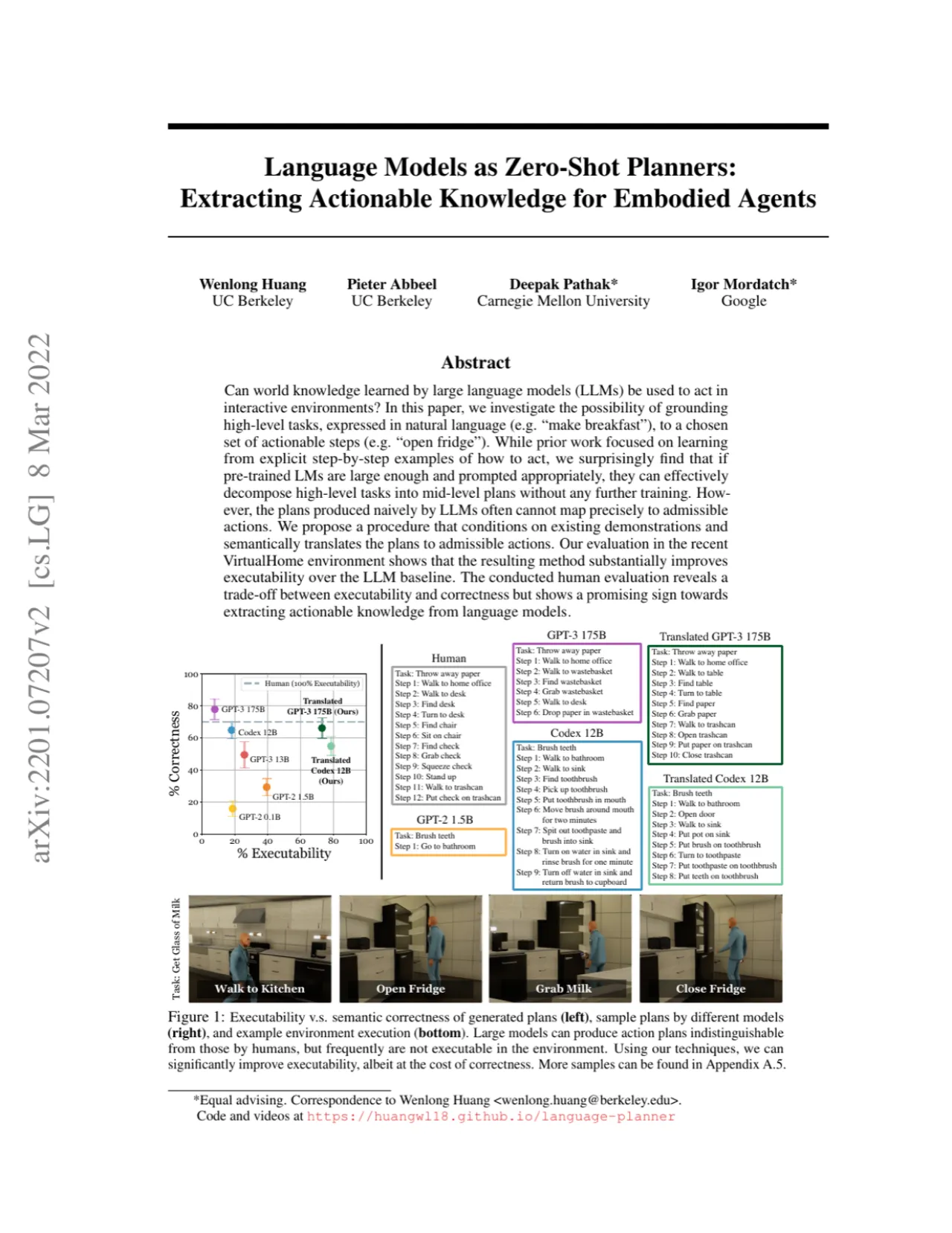
LLMs 通过海量文本预训练,内化了大量关于人类日常活动的世界知识。然而,先前研究大多将 LLMs 局限于语言生成与理解任务。本文提出核心问题:LLMs 中隐含的行动知识能否在无额外训练的情况下,直接驱动具身智能体执行家庭任务?
"We ask whether we can use such knowledge contained in LLMs not just for linguistic tasks, but to make goal-driven decisions that can be enacted in interactive, embodied environments."
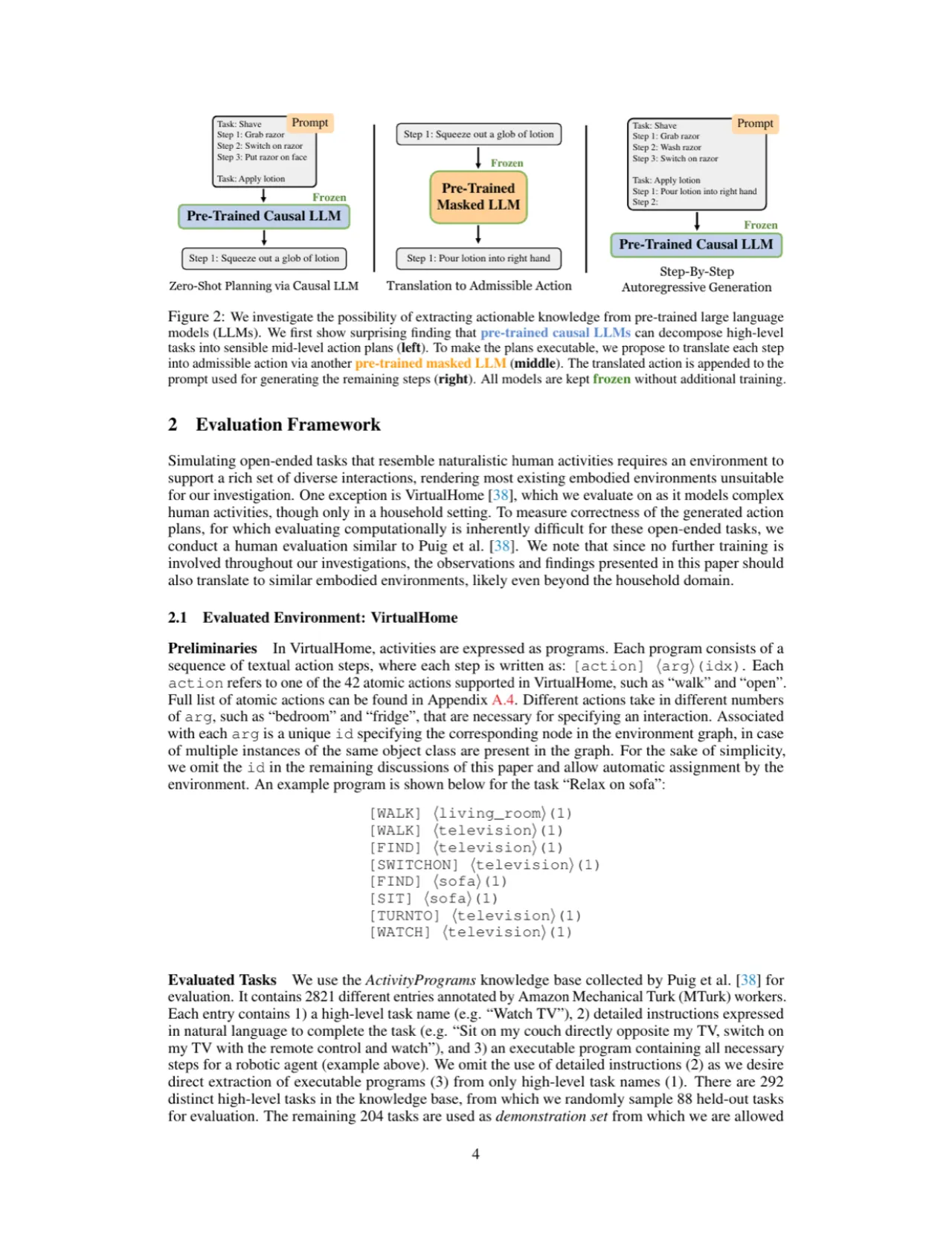
挑战在于双重困境:LLMs 生成的自然语言计划语义上合理,却难以直接映射到环境支持的原子动作(如 [WALK] <bedroom>);而严格约束输出格式又会丢失 LLMs 的世界知识。本文在 VirtualHome 仿真环境中评估,该环境支持 42 种原子动作,覆盖 292 类日常家庭活动。
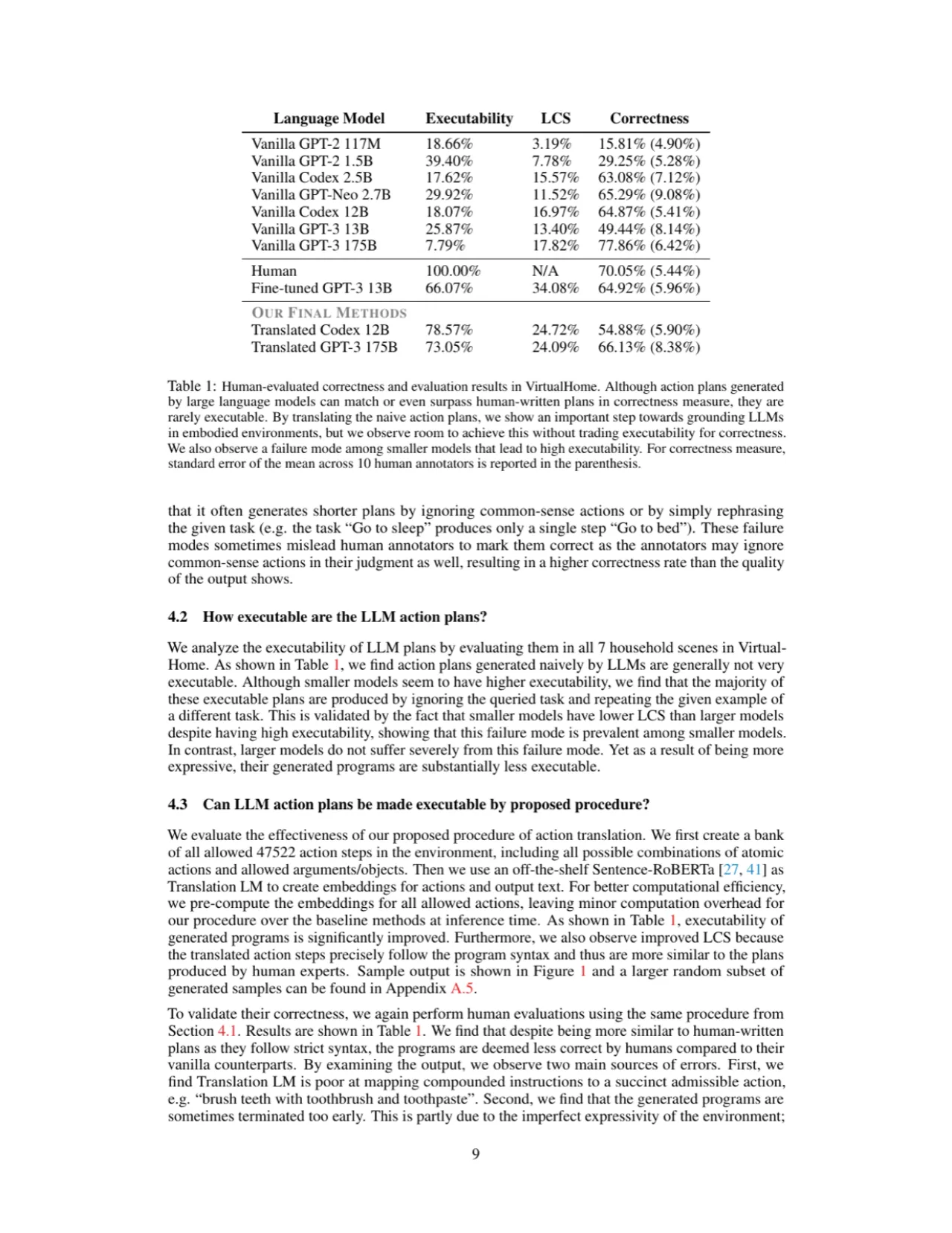
18% → 79%Codex 12B 可执行率提升(Translated vs. Vanilla)
7.79% → 73%GPT-3 175B 可执行率提升
77.86%Vanilla GPT-3 175B 人类评估正确性(超越人类基准 70.05%)
35.23%Translated Codex 12B 同时正确且可执行的比例