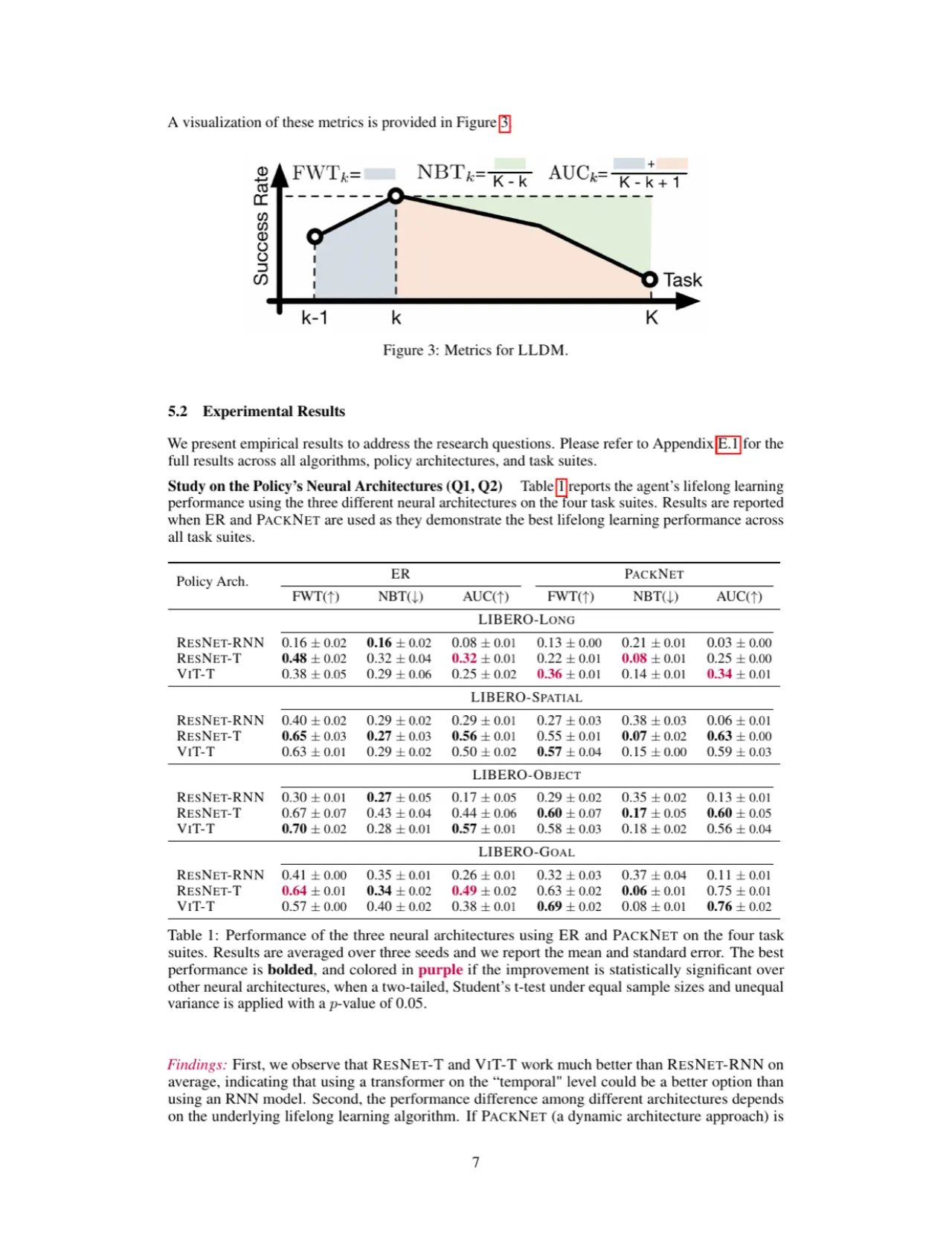
主要发现:"No single visual encoder architecture excels across all knowledge transfer types." ResNet 在大多数任务套件中优于 ViT-T,但对于以程序性知识迁移为主的 LIBERO-Long,ViT-T 表现更佳,体现了其对长序列时序建模的优势。
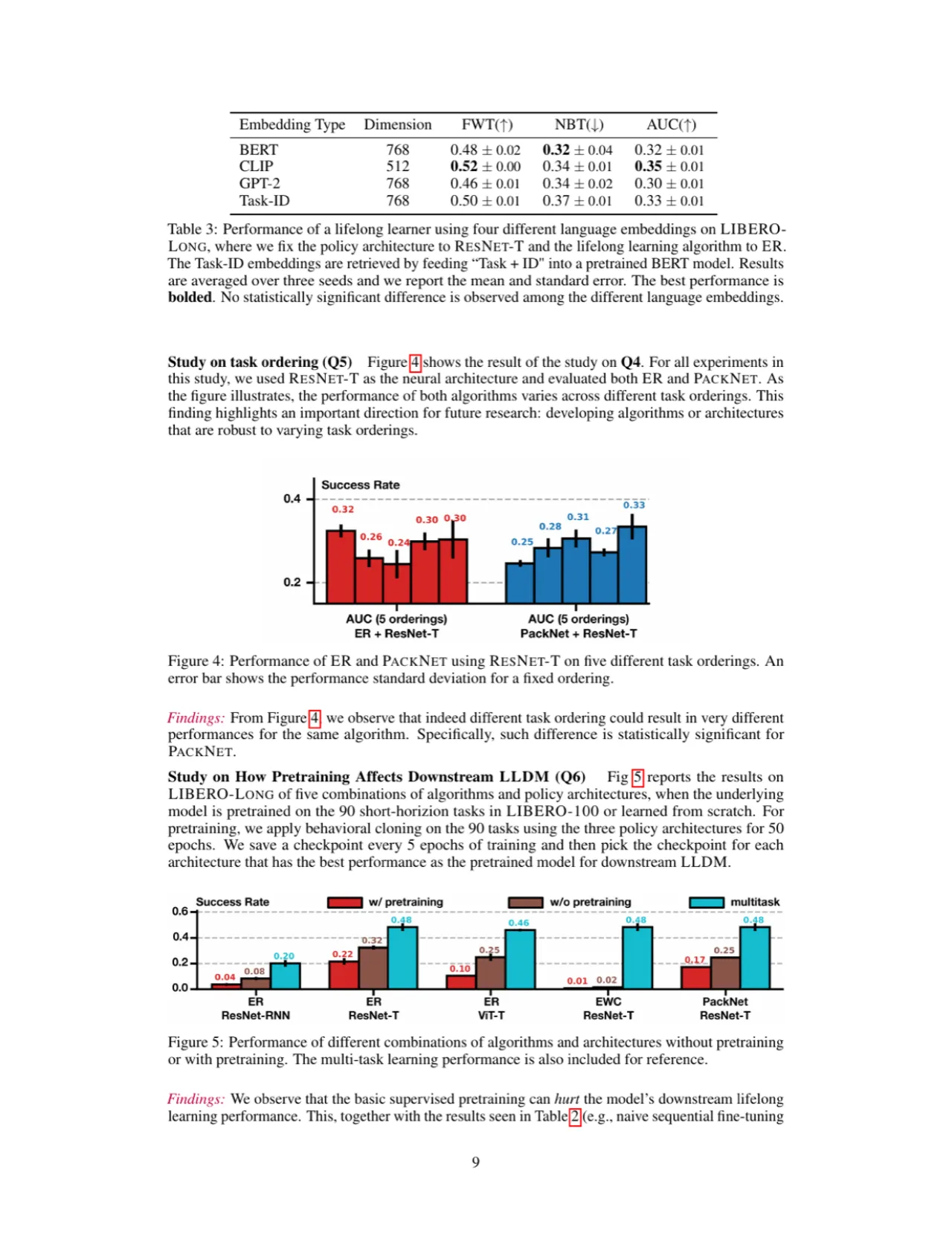
Figure 4(左):ER 与 PackNet 在 LIBERO-LONG 的 50 种随机任务顺序下的 AUC@7 分布。ER 在不同顺序下波动显著大于 PackNet,说明 ER 对任务顺序更为敏感。(右):LIBERO-GOAL 下两种算法的成功率随任务序号 k 的变化,PackNet 维持相对稳定而 ER 振荡更大。
Q5:预训练对终身学习的影响
实验表明:"Naive supervised pretraining can hinder agents' performance in the subsequent LLDM." 在大规模离线数据集上进行监督式预训练后,智能体在后续 LLDM(Lifelong Learning for Decision-Making)阶段的表现反而下降,说明纯监督预训练会干扰策略在终身学习场景下的适应能力,这是一个出人意料的负面迁移现象。
Task Identifier 嵌入对比
实验对比了四种任务标识符嵌入方式(BERT / GPT-2 / Task ID / Sentence Transformer)。结果表明 BERT 和 Task ID 嵌入在大多数任务套件上表现相当甚至更优,而 Sentence Transformer 嵌入表现出对语义任务描述的更好利用,尤其是在 LIBERO-Goal 中。