"To learn a truly general and transferable latent action world model, we argue that we must go beyond these targeted data sources. Sources of natural in-the-wild videos such as HowTo100M or YoutubeTemporal-1B provide a much richer and general learning environment than usually studied."
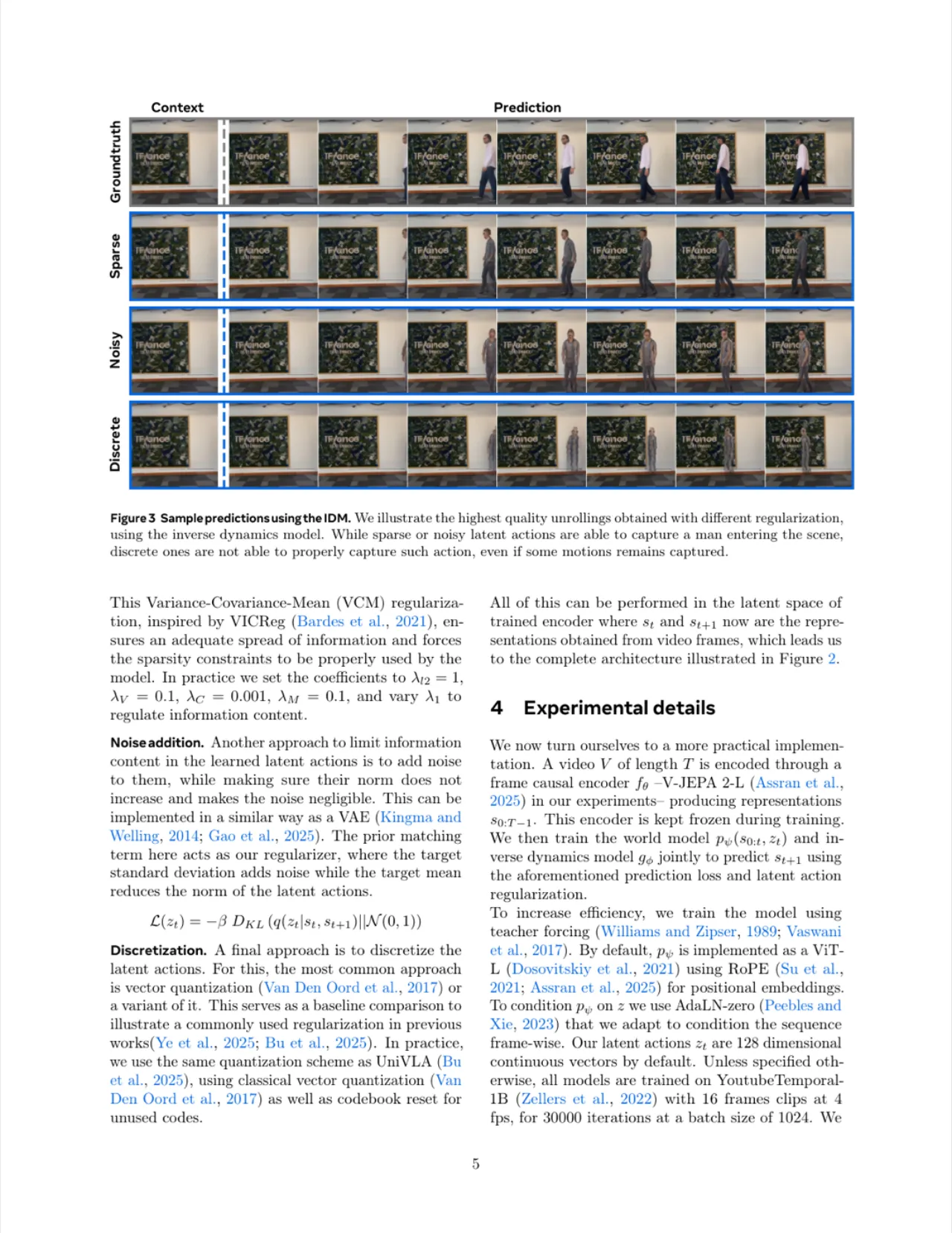
Figure 3 — Sample predictions using the IDM. 稀疏(Sparse)和噪声(Noisy)潜在动作均能捕捉"一个人走进场景"这一复杂动作;而离散(Discrete/VQ)方式仅能呈现模糊的移动团块,无法精确还原细节。这直接说明向量量化在真实世界视频的复杂性面前能力受限。
预测误差与信息容量
稀疏和噪声潜在动作通过调节超参数(λl1 或 β),可在无约束连续动作(最低误差)与纯确定性世界模型(最高误差)之间灵活权衡,形成连续的容量谱系。而向量量化方法难以提升容量,始终靠近确定性基线,"the vector quantization based approach struggles to scale its capacity and remains very close to the deterministic baseline."
在 Kinetics(人类活动视频)和 RECON(导航)上,将视频 A 的潜在动作迁移至视频 B 再反推,cycle consistency 误差增幅极小(约 ×1.03 ~ ×1.34),证明潜在动作具有跨视频迁移性,且此迁移并非来自未来帧泄漏。
定性分析(Figure 7/8):可将"一人向左行走"的动作迁移至"飞行球",球随即向左运动;还能仅对画面中空间位置最近的人施加动作,体现出空间局部性——"due to a lack of common embodiment in natural videos, the model learns generic actions that are applied relative to the camera."
下游规划性能
通过训练控制器,LAM 可用于 DROID(Franka Emika Panda 机械臂)和 RECON(户外导航)上的视觉规划任务,采用 CEM 在 H=3 步规划。关键结论:
Figure 12 — Scaling trends. 在模型规模(Large→Giant)、训练时长(30k→120k 步)和数据量三个维度上扩展均能提升 IDM 自然视频预测质量(上行);规划性能方面,训练时长的提升最为显著,模型规模对噪声潜在动作有帮助,而数据量的影响不显著——"these results would suggest that while scaling can improve the quality of a latent action world model…this may not always be visible in downstream tasks that mainly evaluate simple actions."
04 局限性
Note: 以下局限性均由作者在论文"Limitations and future work"节明确阐述。
潜在动作空间中的采样与规划(Sampling and planning in latent action space)
本文主要研究将已知动作映射到潜在动作(控制器方案),而非直接在潜在动作空间内采样规划。作者承认"most of the work is ahead for high dimensional structured latent actions",直接利用潜在动作进行规划(如 Rybkin et al., 2019 的方法)仍是开放问题。
冻结表示限制单阶段训练(Shaping representations with single stage training)
世界模型训练在冻结的 V-JEPA 2 表示之上进行,而该表示空间并非针对预测设计。这可能制约逆动力学模型训练质量及预测精度。若能将潜在动作引入 V-JEPA 2 预训练(单阶段编码器/世界模型联合训练),可能带来显著提升——作者视之为"an exciting direction for future work."
规划性能与视频生成质量不相关(inferred)
实验发现,unrolling 视觉质量(LPIPS)与规划性能(Δxyz / RPE)之间的相关性较弱——规划最好的模型往往并非视频生成最清晰的模型。这一"common challenge in the world model literature"意味着评估指标的选择对 LAM 研究结论至关重要。