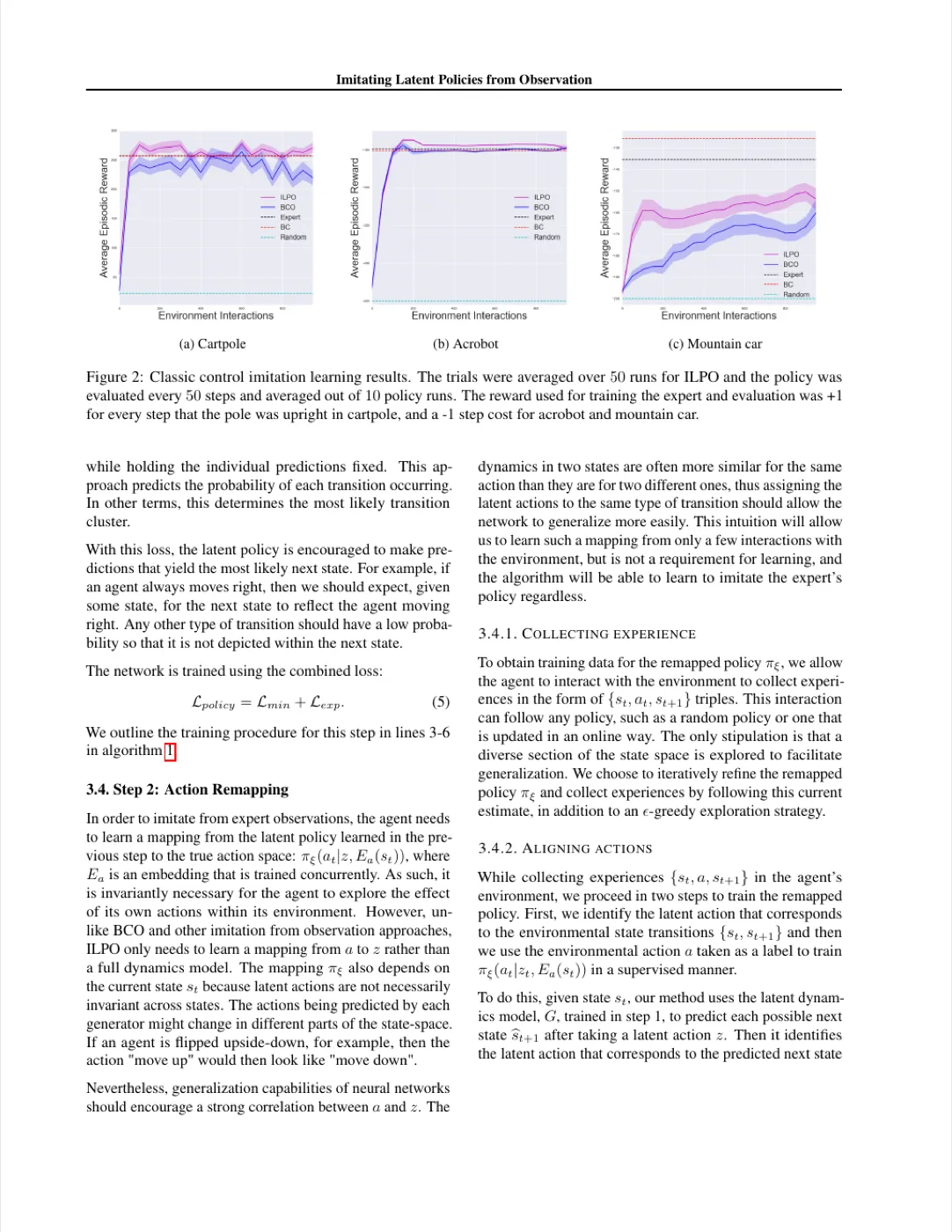
02 方法
ILPO 分为两个阶段:Step 1 离线学习 latent policy 和 forward dynamics model; Step 2 用少量真实环境交互学习 action remapping network,将 latent actions 对齐到真实动作。 推理时,先选最可能的 latent action,再映射到对应的真实动作。
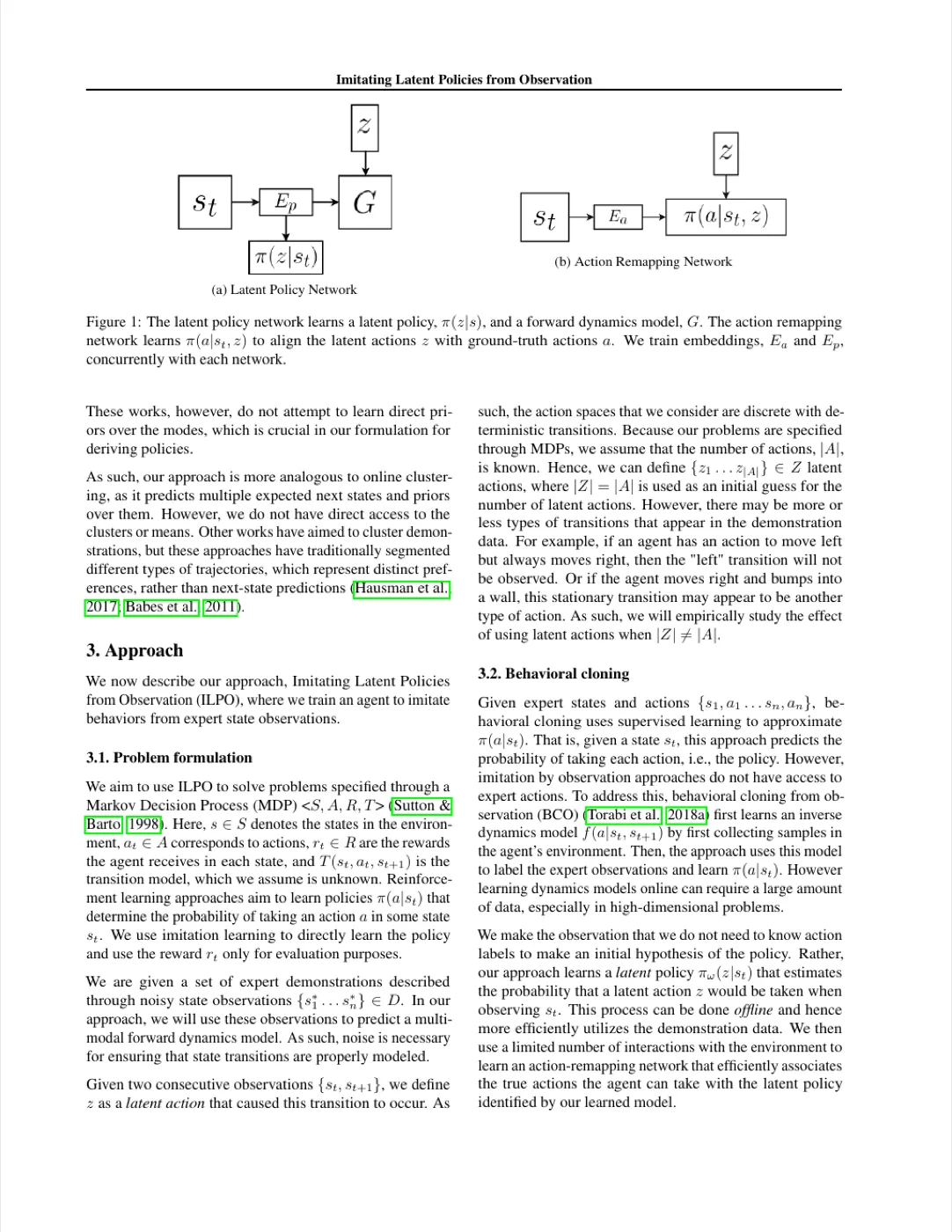
Step 1:学习 Latent Policy
给定专家状态序列 {st, st+1},ILPO 联合训练两个目标:
-
Latent forward dynamics(Lmin):
生成器 G 对每个 latent action z 各自预测下一状态变化量 Δt = st+1 − st,
损失只惩罚预测最近的那个模式:
Lmin = minz ‖Δt − Gθ(Ep(st), z)‖₂。 这使每个生成器收敛到一类转移簇(transition cluster),而非预测所有转移的均值。 -
Latent policy learning(Lexp):
πω(z|st) 表示在状态 st 下观察到 z 类转移的概率。
通过最小化期望下一状态与真实下一状态的差异来训练:
ŝt+1 = Σz πω(z|st) Gθ(Ep(st), z), 损失 Lexp = ‖st+1 − ŝt+1‖₂。 总损失 Lpolicy = Lmin + Lexp。
Step 2:Action Remapping(动作对齐)
通过 ε-greedy 策略在真实环境中采集少量 {st, at, st+1} 三元组。 利用已训练好的 G,找到与观测转移最接近的 latent action:
-
低维状态:
zt = argminz ‖st+1 − Gθ(Ep(st), z)‖₂ -
高维视觉输入:
zt = argminz ‖Ep(st+1) − Ep(Gθ(Ep(st), z))‖₂(在 embedding 空间度量距离)
得到 zt 后,以真实动作 at 为标签,通过 cross-entropy loss 监督训练 action remapping network πξ(at|zt, Ea(st))。 由于神经网络的泛化能力,相同动作在不同状态下通常产生相似的状态转移, 因此只需少量交互就能学会可泛化的 latent-to-real 映射。
推理:组合两步策略
给定状态 st:先选最可能的 latent action
z* = argmaxz πω(z|st),
再选最可能对应该 latent action 的真实动作
a* = argmaxa πξ(a|z*, st)。
整个推理过程无需额外环境交互。