01 动机 · Motivation
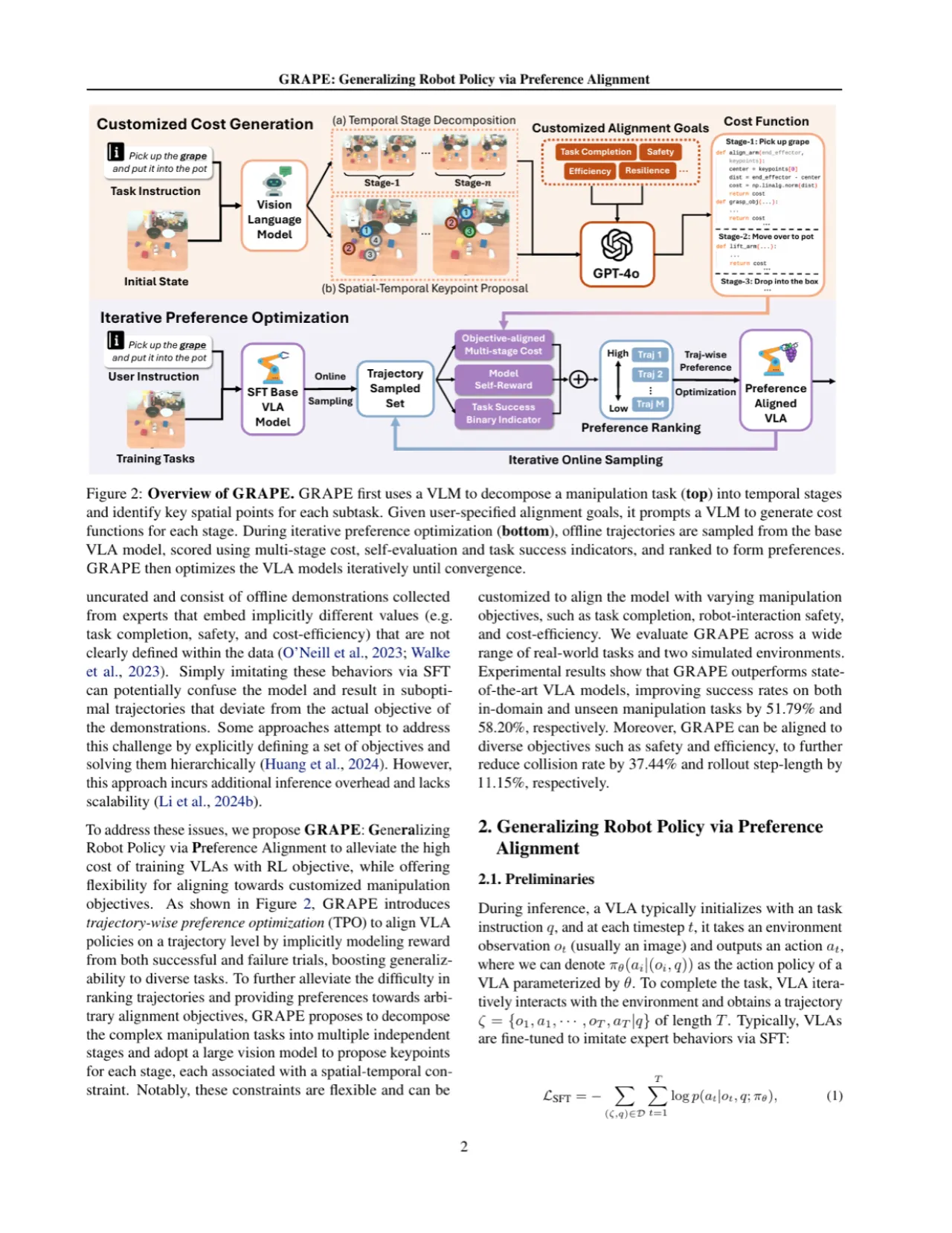
VLA 模型经过 supervised fine-tuning(SFT)后,在控制环境下表现出色,但在新物体、新语义、新场景等 out-of-distribution(OOD)条件下泛化能力严重不足。根本原因在于:SFT 仅从成功示范中做行为克隆,无法建立对任务目标和潜在失败模式的整体理解;同时,数据集通常收集自不同专家,隐含不同价值取向(完成率、安全性、效率),简单模仿反而造成目标混乱。
"VLAs simply imitate actions from successful rollouts via behavior cloning while not developing a holistic understanding of the task goal or potential failure patterns."

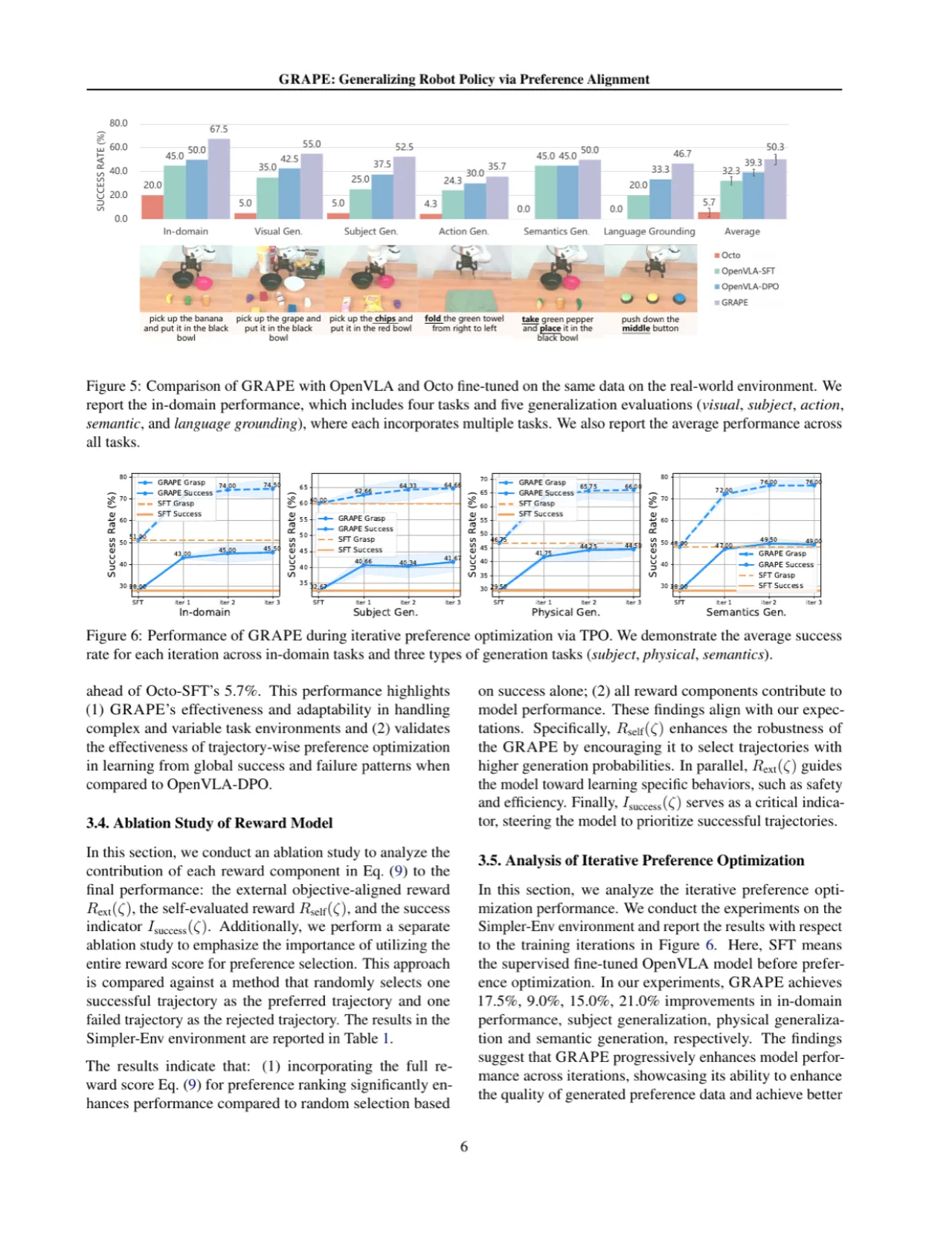
+51.79%领域内任务成功率提升(vs. SFT baseline)
+58.20%未见操作任务成功率提升
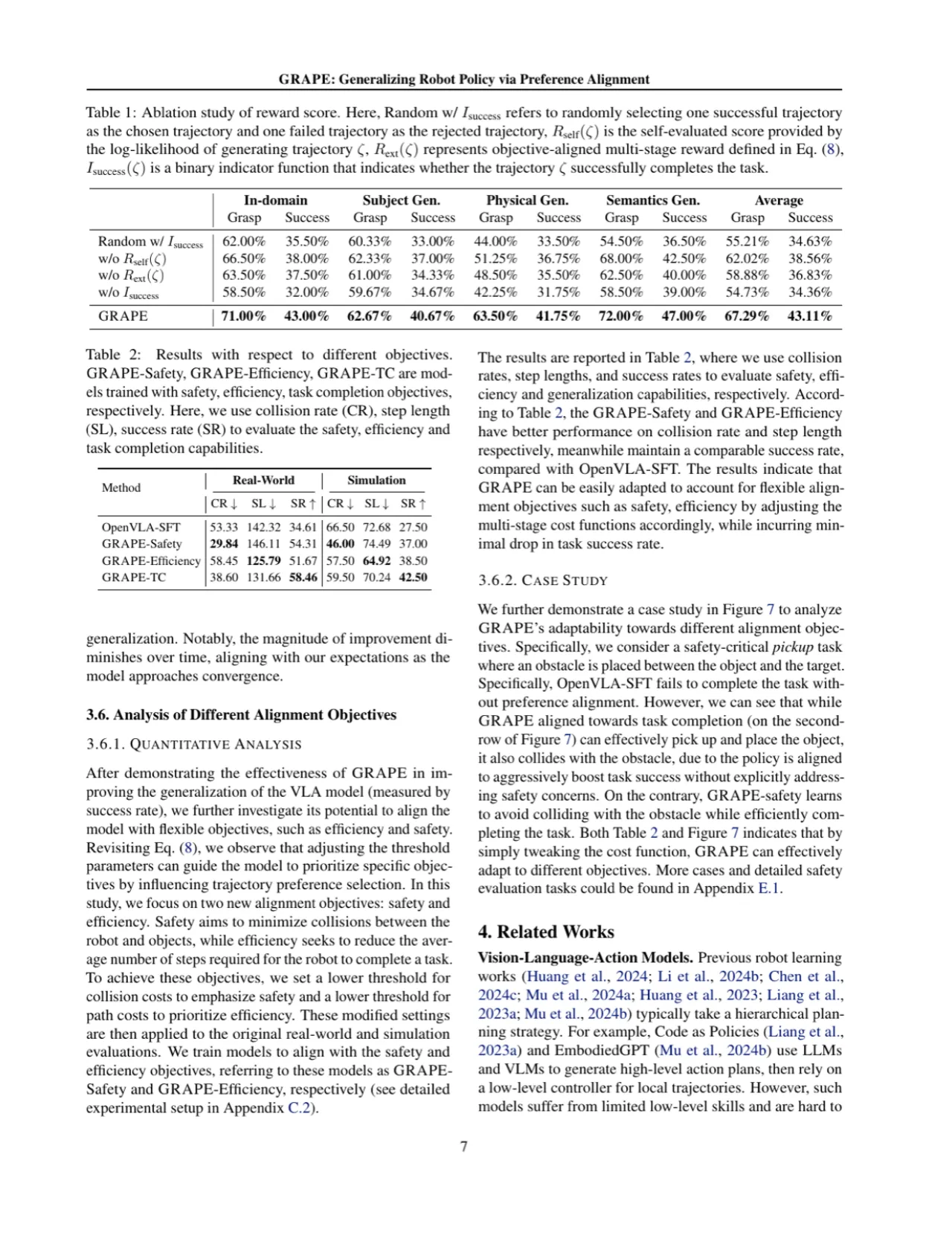
−37.44%碰撞率下降(GRAPE-Safety)
−11.15%平均步长减少(GRAPE-Efficiency)
现有强化学习(RL)方案(如 PPO)理论上可增强泛化能力,但存在三大瓶颈:
- 操作任务目标多样复杂,奖励难以解析定义;
- 人工标注机器人操作偏好数据成本极高;
- 数值梯度近似不精确,导致 RL 算法(如 PPO)容易崩溃。