01 动机
机器人模仿学习的性能随数据集规模提升而提升,但高质量演示数据的采集仍是主要瓶颈。传统双边遥操作设备(如力反馈外骨骼)成本高昂;而 VR 控制器、SpaceMouse 等低成本替代方案将机器人运动学抽象化,使操作者难以感知奇异点和碰撞风险,操作效率低下。
"Systems that abstract away kinematic constraints prevent operators from managing singularities and collisions effectively."
<$300GELLO 全套硬件成本
0.92GELLO 平均任务成功率
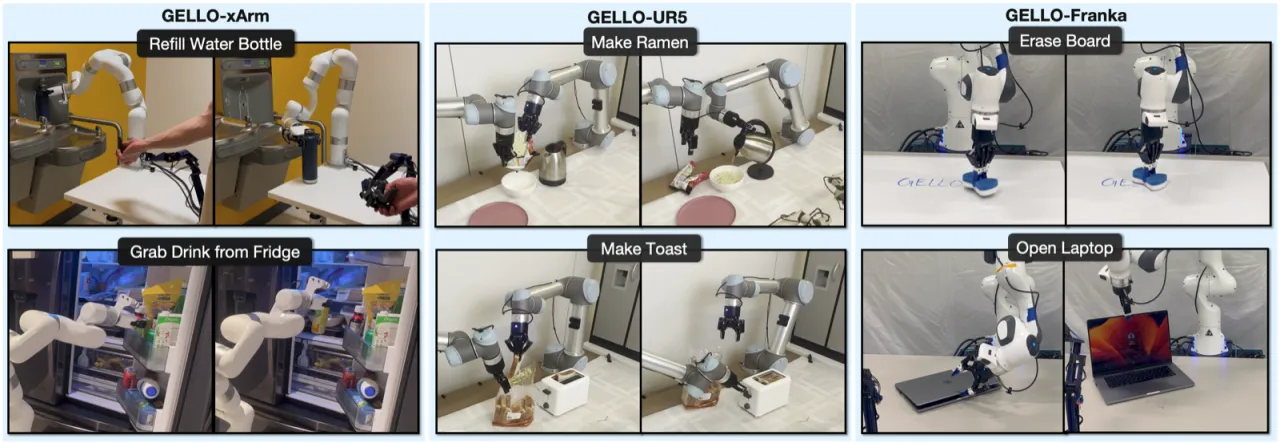
3支持的机器人平台(Franka / UR5 / xArm)
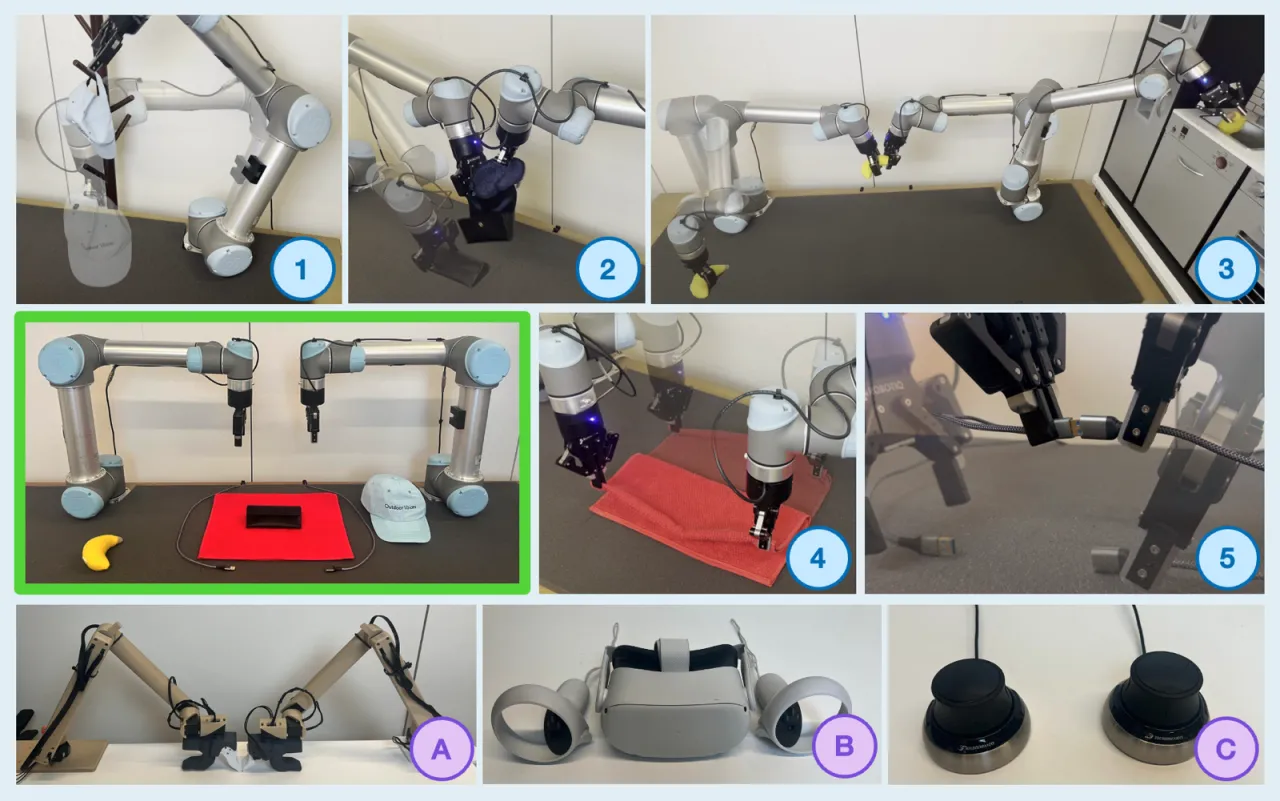
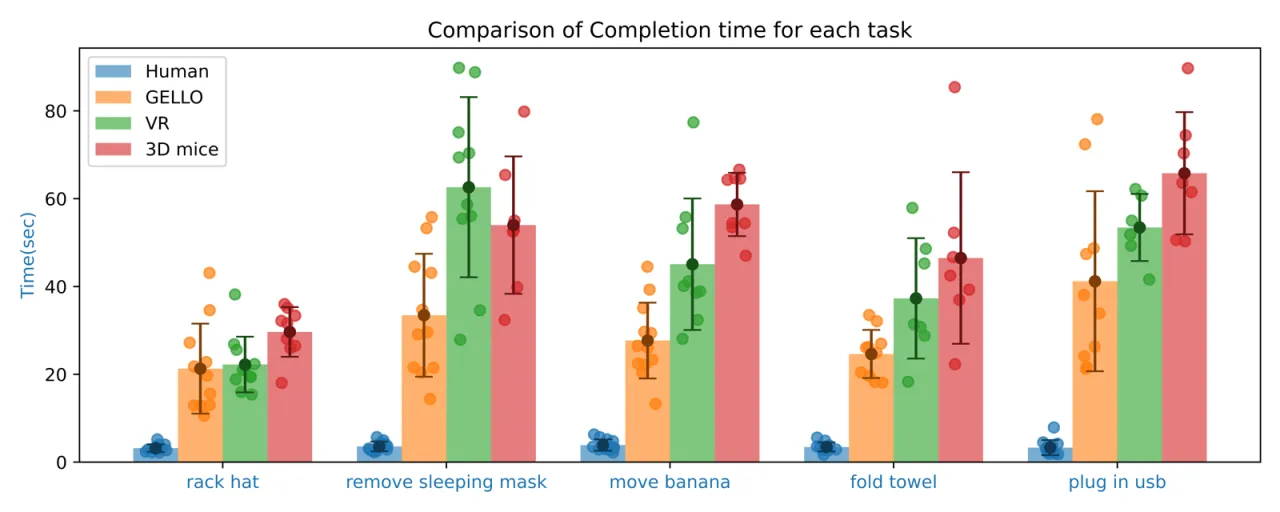
5用户研究任务数(12 名参与者)
现有方案的局限
高成本方案
- 力反馈外骨骼(如 Omega7):约 $40,000
- Robot-to-robot 遥操作(UR5):约 $30,000
- ALOHA 等方案需额外完整机器人臂,成本高且移植性差
低成本方案的痛点
- 3D Mouse(SpaceMouse):$150,抽象末端执行器,忽略运动学
- VR 控制器(Meta Quest 2):$300,手腕方向不自然映射
- 均无法感知奇异点与自碰撞,导致频繁失败