01 动机
现有真实世界机器人操作基准仅能评估推物、拾放等简单短时域任务。要让机器人真正胜任日常任务(整理房间、烹饪、组装家具),需要更具挑战性、可复现的长时域复杂操作基准。
"these approaches have been limited to learning simple behaviors in current real-world manipulation benchmarks, such as pushing or pick-and-place."

家具组装之所以是理想的基准任务,在于它同时要求:
- 长时域规划(Long-horizon planning):单次完整组装平均需 60–230 秒、600–2300 个低层步骤,远超 Roboturk(15–120 秒)等现有基准。
- 多样灵巧技能(Diverse dexterous skills):抓取、重定向、插接(inserting)、螺旋固定(screwing)等技能缺一不可。
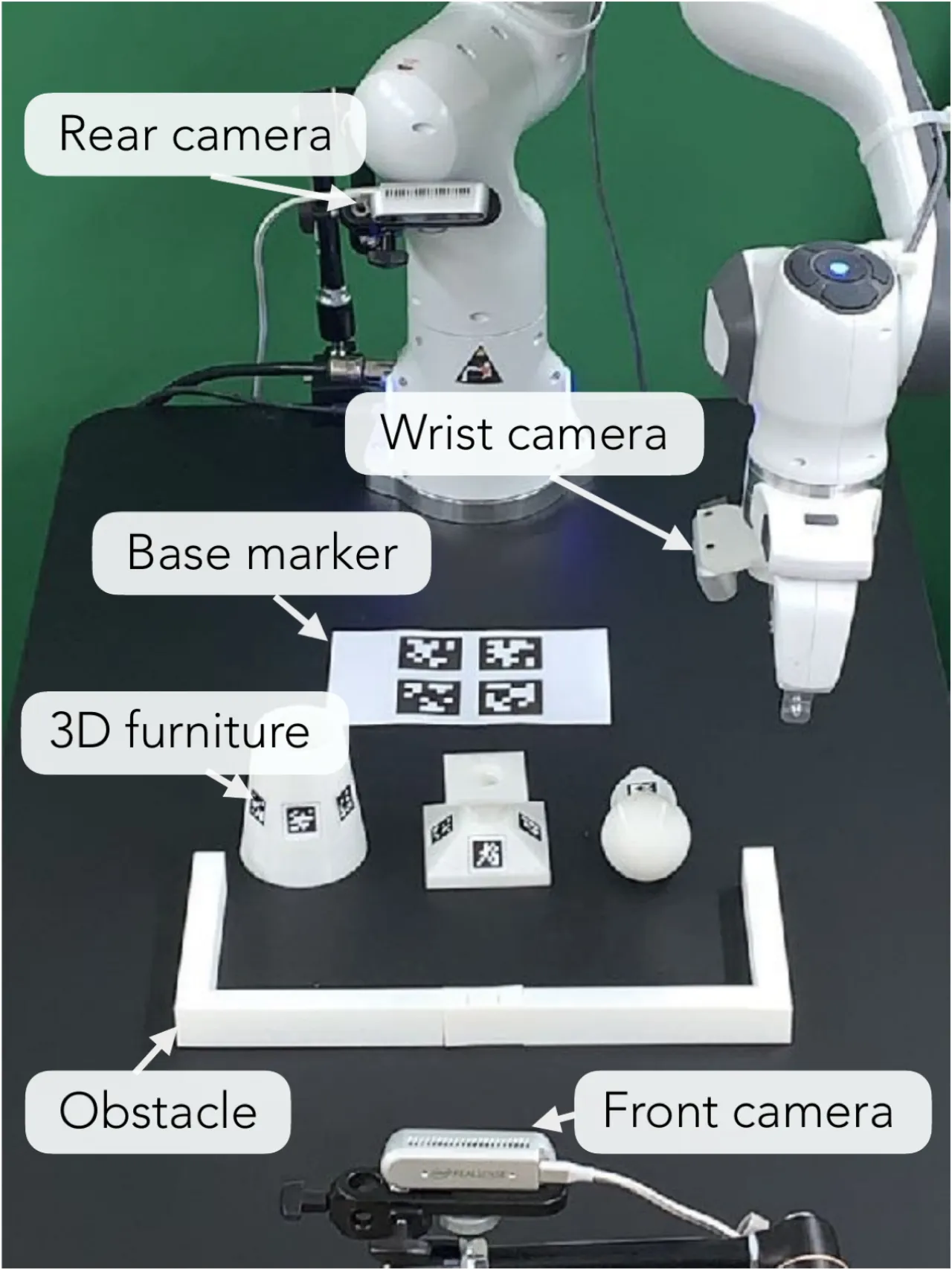
- 可靠 3D 感知(3D perception):需通过正面摄像头与腕部摄像头协作完成精准对齐。
8种家具模型
5000+条遥操作演示
219.6h演示总时长
10Hz末端执行器控制频率