"Achieving dexterous robotic manipulation in the real world relies heavily on human supervision and algorithmic engineering, which is a central bottleneck in the pursuit of general physical intelligence."
系统控制架构:展示四个核心模块(EN / PI / R / E)的交互关系——环境接口(EN)向智能体暴露复位、安全、验证和日志调用接口;策略改进模块(PI)从奖励信号、视频和失败案例生成并修订代码;Rollout 模块(R)在机器人上执行预算内的 trials;进化模块(E)对比分支、复用成功配方、剪枝失败假设。
EN Environment — 环境模块
"Construct reset, safety, verification, and logging interfaces the agent can call." 实现自动复位(auto reset)与自动评估(auto evaluation),保证每次 trial 从已知的随机初始状态出发,且结果可量化记录。
PI Policy Improvement — 策略改进模块
"Generate and revise policy code from rewards, videos, traces, and failure cases." 支持多种 PI 范式:启发式学习(heuristic learning)、工具调用(tool calling)、行为克隆(BC)、离线 RL、在线 RL。
R Rollout — 轨迹执行模块
"Run budgeted robot trials and preserve the state, action, video, and result for audit." 支持单机器人或多机器人并行执行,保存状态、动作、视频和结果供后续分析。
E Evolution — 进化模块
"Compare branches, reuse successful recipes, and prune hypotheses that fail on hardware." 代码智能体读取日志、查阅文献,改进训练基础设施和算法代码以应对失败模式。
Tie Zip-tie:"Grasp the zip-tie's head from anywhere on the table with one hand. Use the other hand to grab and curl its tail, aligning the strap with the head."
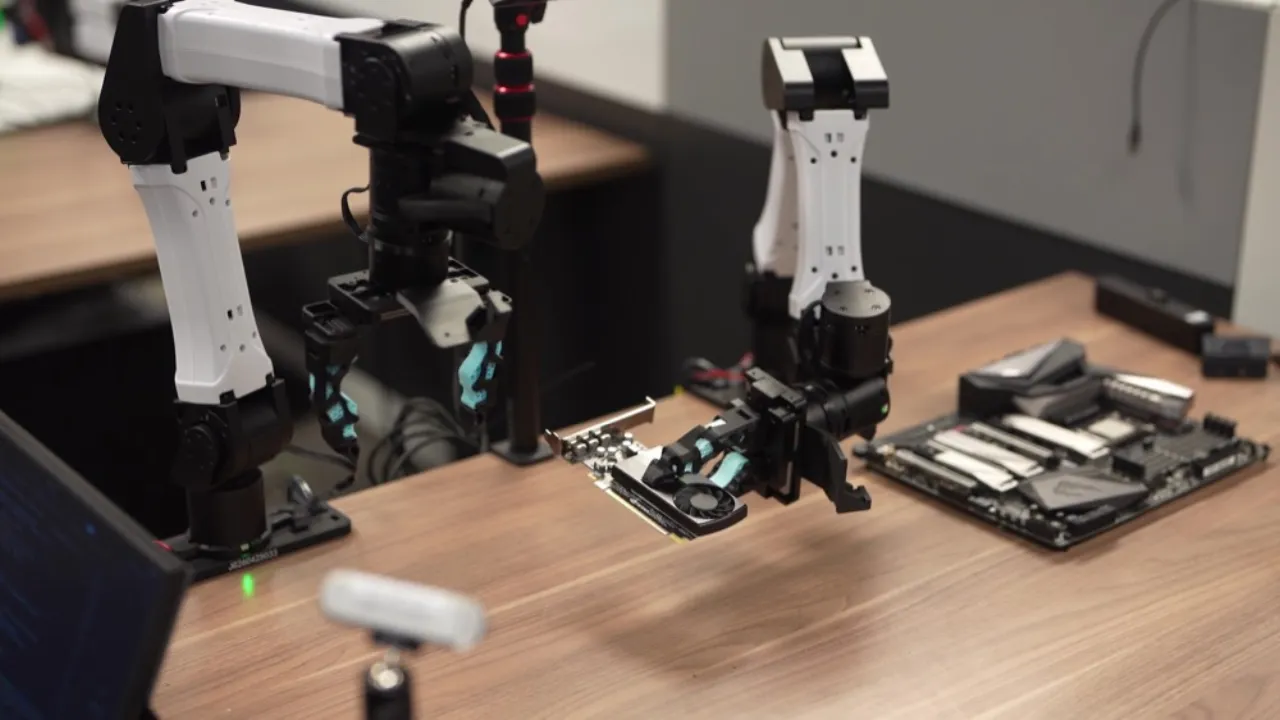
GPU Insertion:"Pick up the GPU from anywhere on the table and move it to a pre-insertion pose. Unplug the GPU from the board to return the scene for the next trial."
论文定义:"pass@8 is not best-of-8 i.i.d. samples on the task. Within a single long-horizon rollout, the agentic loop gets up to 8 in-context retries per subtask, each conditioned on the previous failures — so it measures emergent retry and recovery, not sampling luck."
"Policies trained with ENPIRE reach a 99% pass@8 success rate across the showcased manipulation tasks."
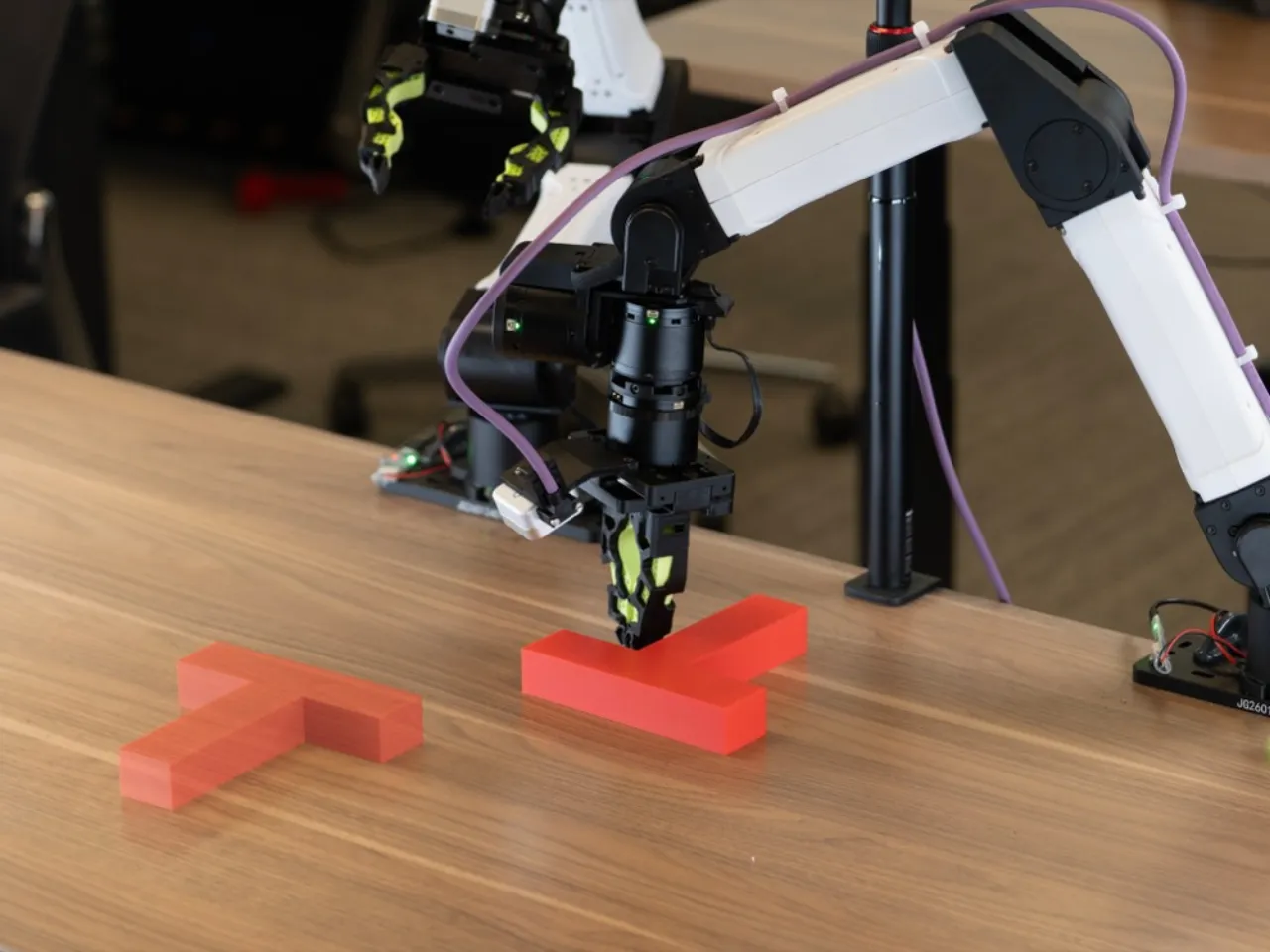
Push-T:将 T 形木块推至目标位置,需精确接触控制。Pin Insertion:将多根插针逐一插入针盒,需亚毫米级精度。GPU Insertion:将 GPU 插入 PCIe 插槽,真实工业级精密装配。Cut Zip-tie / Tie Zip-tie:使用切割工具切断或穿系扎带,高度灵巧双手协作任务。
典型提示词(prompt)示例:"Write a heuristic policy, with no neural network training, to achieve a 100% success rate in the Push-T environment over at least 50 continuous episodes. You are not allowed to modify environment code; that is cheating. No cheating. Fan out a subagent team to try approaches."
仿真评测(RoboCasa)
ENPIRE 同时在 RoboCasa 仿真环境中评测了以下任务的策略自动生成能力:Coffee Setup Mug、Open Cabinet、Open Drawer、Open Stand Mixer、Counter to Cabinet、Sink to Counter、Turn Off Stove、Turn On Sink。
"Coding agents do not fully utilize robot resources when they are reading logs, writing code, debugging, or waiting for the language-model backbone. As the number of robots scales, MRU decreases while GPU active utilization increases. Compared to a single-robot setup, agent teams spend more time summarizing peer branches and less time operating the robot, and coding agents may fail to launch enough parallel training sessions to exhaust GPU resources."
机队规模扩大导致更高 token 消耗
"Scaling the robot fleet drives higher token consumption: as more agents read logs, summarize peer branches, and coordinate, the total token budget required to reach a successful policy grows with fleet size. Larger fleets can reach success sooner, but the additional speedup comes at the cost of higher token consumption."