01 动机
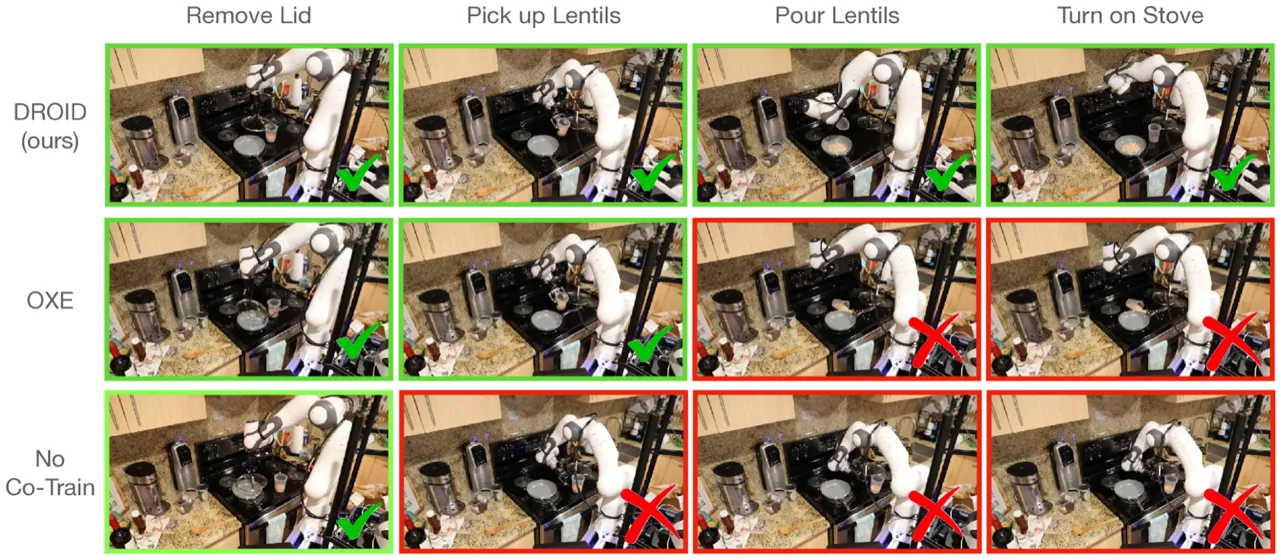
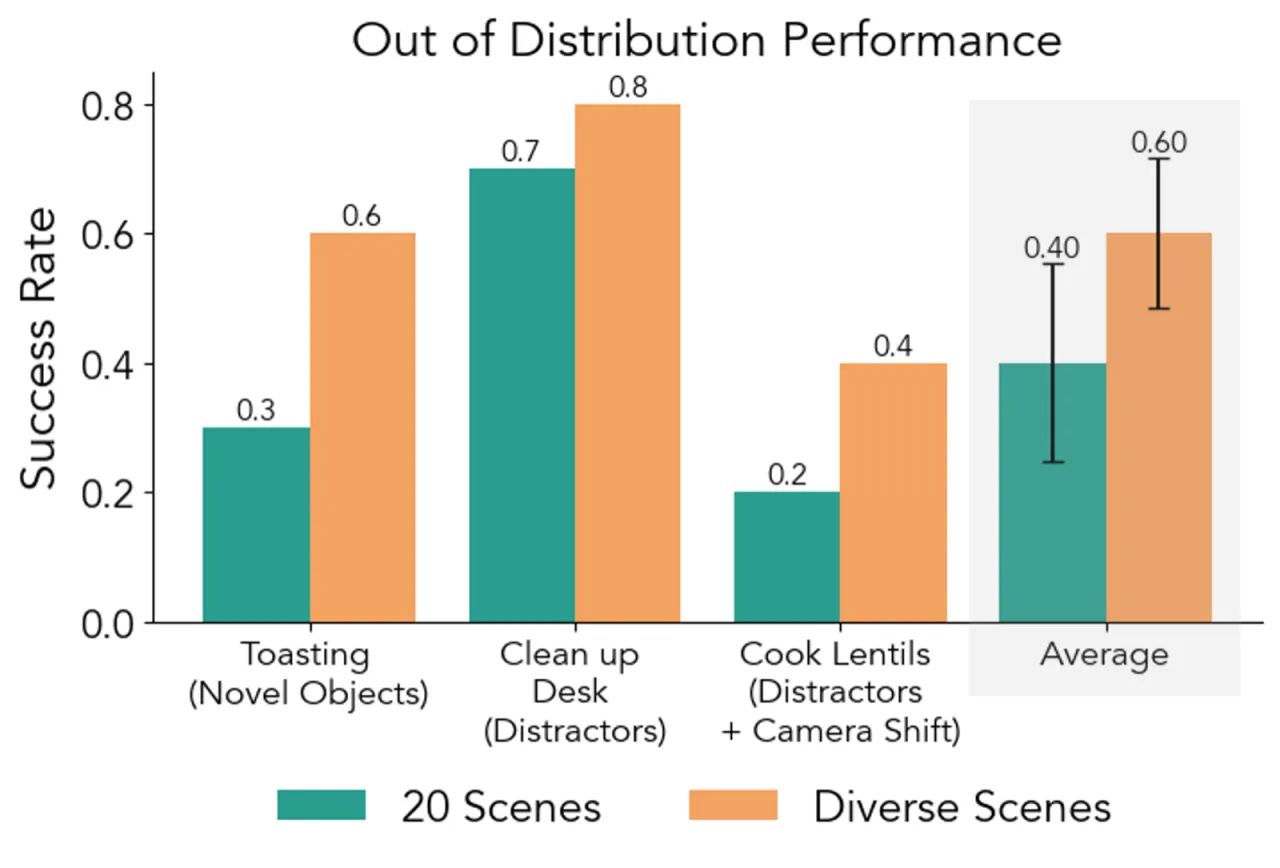
通才型机器人操作策略的关键瓶颈是数据——现有数据集几乎全部在少数受控实验室环境中采集,场景单一、任务有限,导致策略在新场景下的泛化极差。 如何以可扩展的方式采集真实多样的操作数据,是迈向通用机器人的核心挑战。
"Most existing datasets are mostly trained on data collected in a small number of environments with limited scene and task diversity… collecting robot data remains logistically challenging and expensive outside of controlled lab settings."
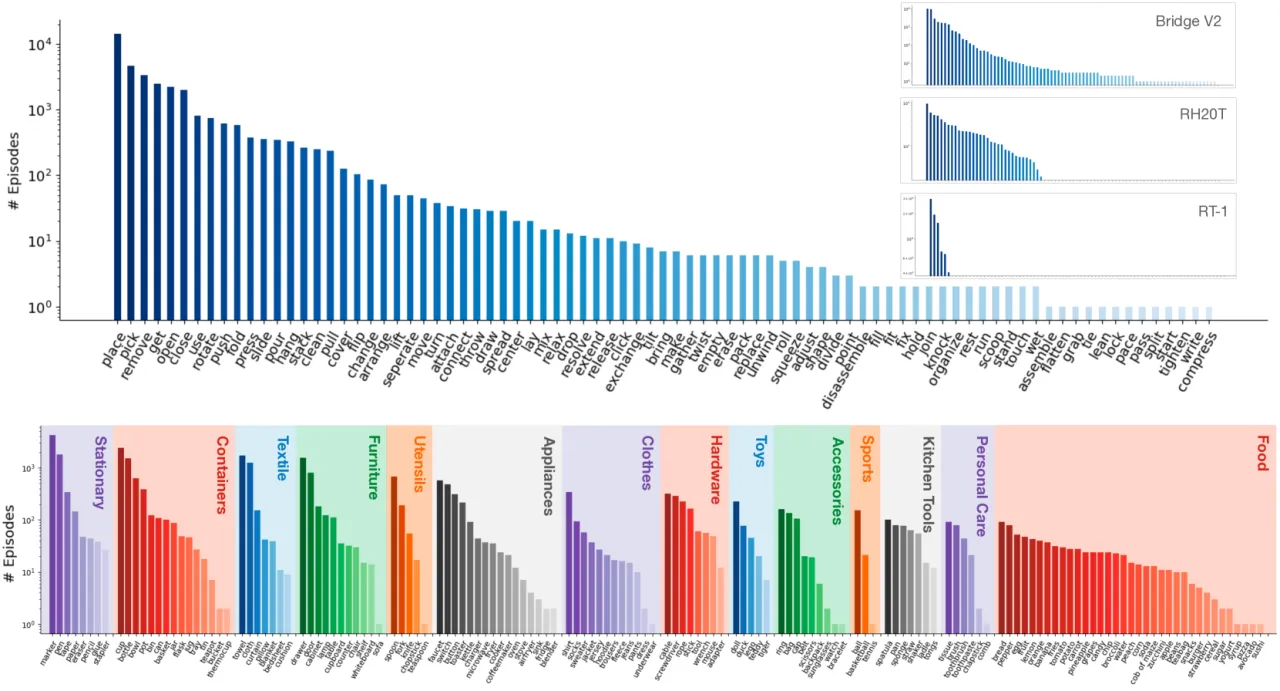
76,000成功演示轨迹
350 h总交互时长
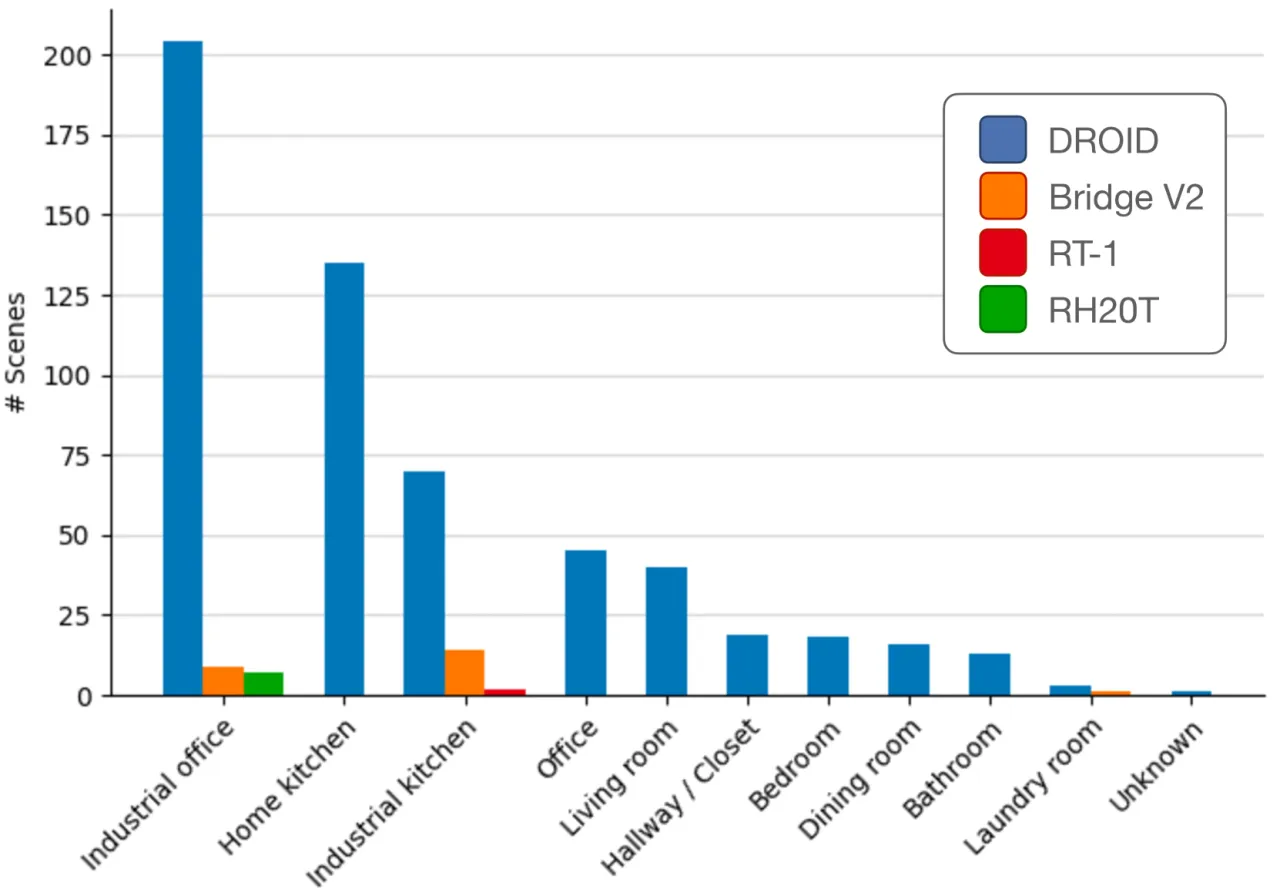
564不同场景数量
86任务类别(动词)