01 动机
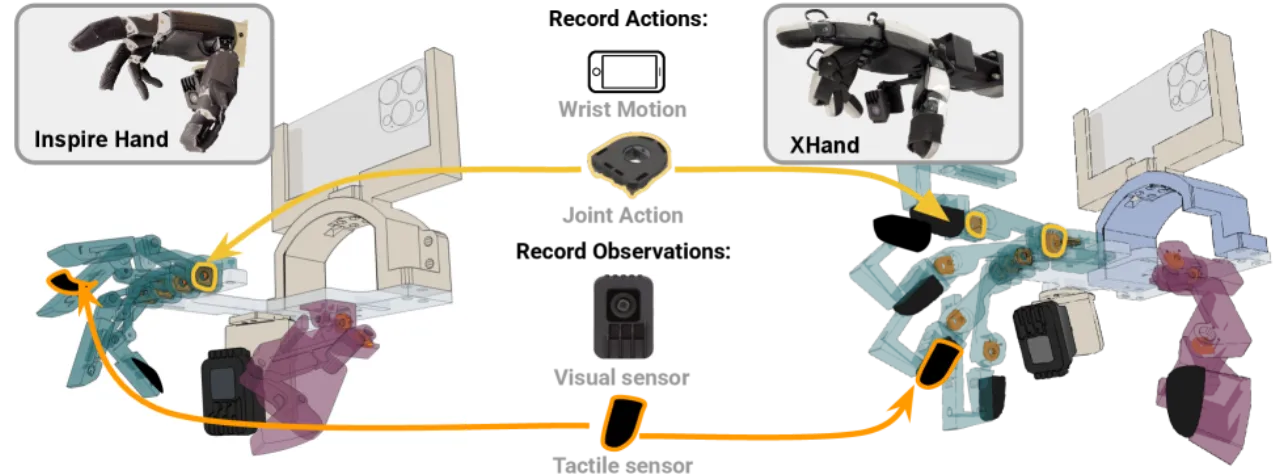
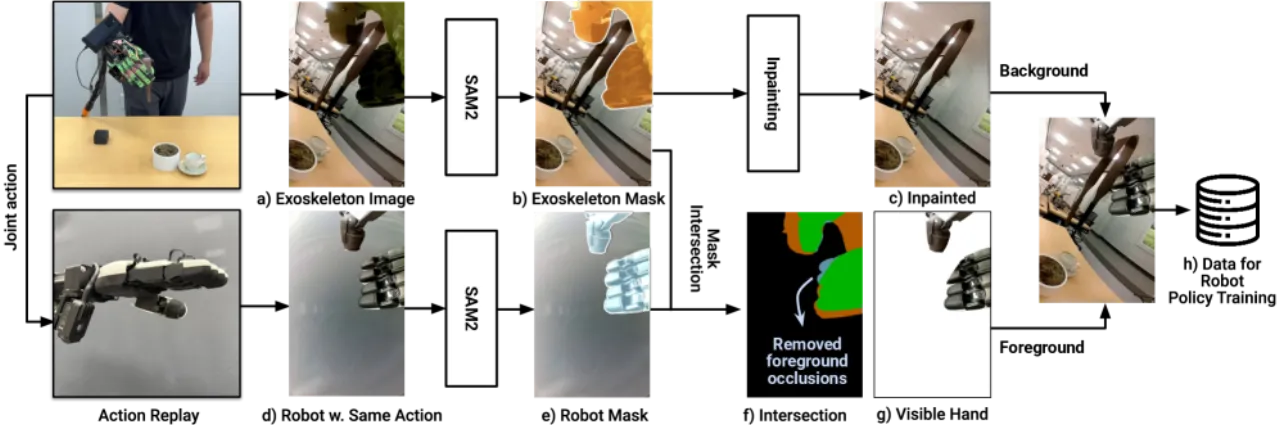
机器人灵巧操作的数据采集极为困难:遥操作(teleoperation)因缺乏直接触觉反馈且存在空间观测不匹配,导致效率低下;而人类演示又因运动学结构、接触面形状、触觉信息和视觉外观的差异,无法直接迁移到机器人手——这一差异被称为 embodiment gap。
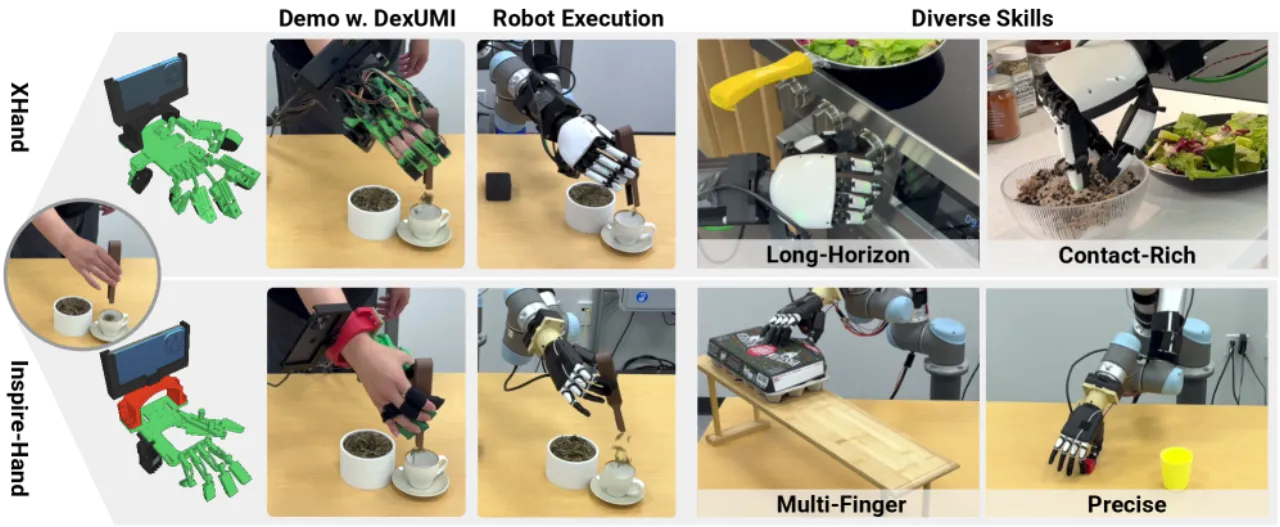
"How can we minimize the embodiment gap, so that we can use the human hand as the universal manipulation interface for diverse robot hands?"
86%两平台平均任务成功率
3.2×相对遥操作的数据采集效率提升
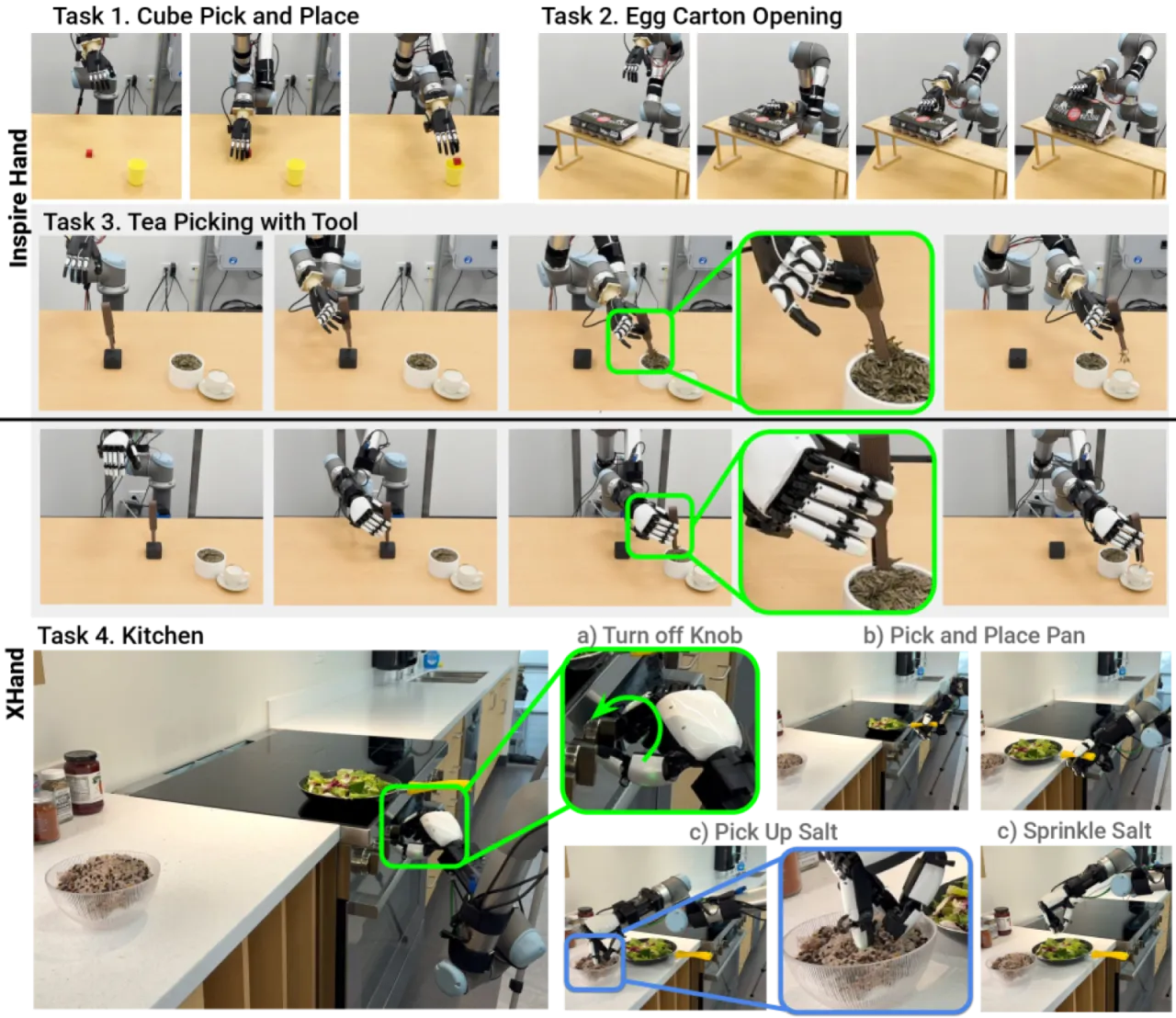
2支持的机器人手平台(Inspire + XHand)
5独立评测任务数量