01 动机
机器人需要理解自然语言指令并转化为具体行为。已有方法(如 SayCan、语义解析器)要么仅输出离散动作序列,要么需要大量标注数据训练,难以泛化到新指令。能否利用 LLM 直接生成结构化的机器人控制程序,从而利用代码的逻辑表达能力实现更强的空间推理与泛化?
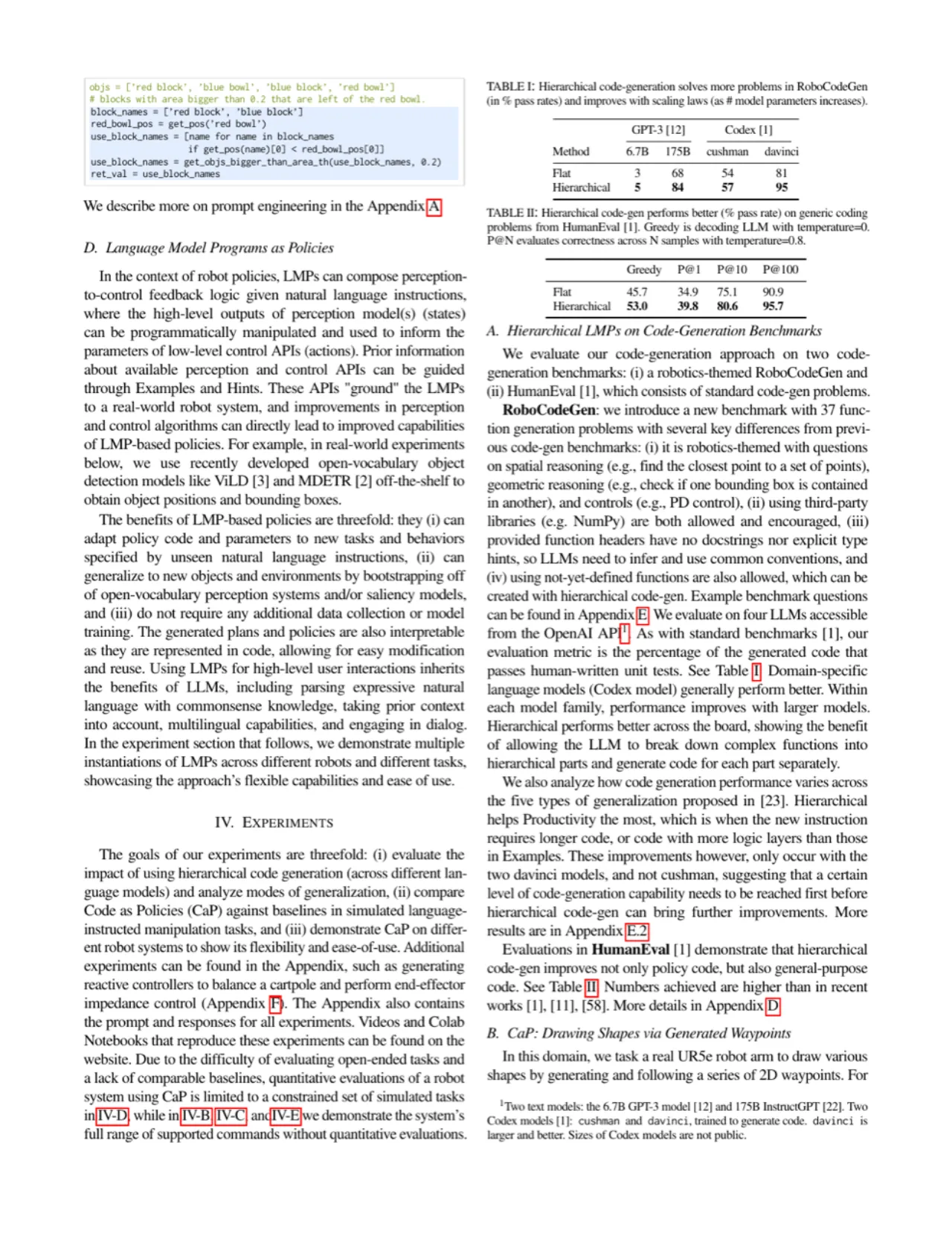
"We find that language models trained on code-completion can be repurposed to write robot policy code, given natural language commands (formatted as comments) and few-shot examples of language instructions followed by corresponding code."

detect_objects)和控制 API(如 pick_place)来完成任务。代码包含逻辑结构(循环、条件判断)和第三方库调用(NumPy、Shapely),可表达复杂的空间推理。4机器人平台(tabletop、whiteboard、mobile nav、mobile manipulation)
37RoboCodeGen 评测任务数量
39.8%层次化 code-gen 在 HumanEval 上的 pass@1 提升
0额外训练样本(zero-shot 场景下)
现有方法的不足
- 语义解析器(Semantic Parsers):需要大量标注数据训练,泛化能力差。
- Chain-of-Thought / SayCan 类方法:只能输出离散动作序列,无法表达循环、条件判断等逻辑结构,也无法调用第三方数值计算库(NumPy、Shapely)进行精确空间推理。
- 端到端 RL / 模仿学习:需要大量环境交互或人类演示,且难以泛化到未见指令。
CaP 的核心洞察是:LLM 在代码补全任务上的训练赋予了它理解和生成 Python 程序的能力,而代码天然具备表达复杂逻辑的能力——这正是自然语言所缺失的。