01 动机 Motivation
机器人策略训练面临两大核心困难:其一,收集带动作标注的演示数据成本极高,且高度依赖特定平台;其二,仿真与真实环境的 sim-to-real gap 使得策略难以直接部署。互联网上已存在海量 RGB 视频,如果能直接从这些无动作标签的视频中学习策略,将大幅降低数据采集门槛并提升泛化能力。
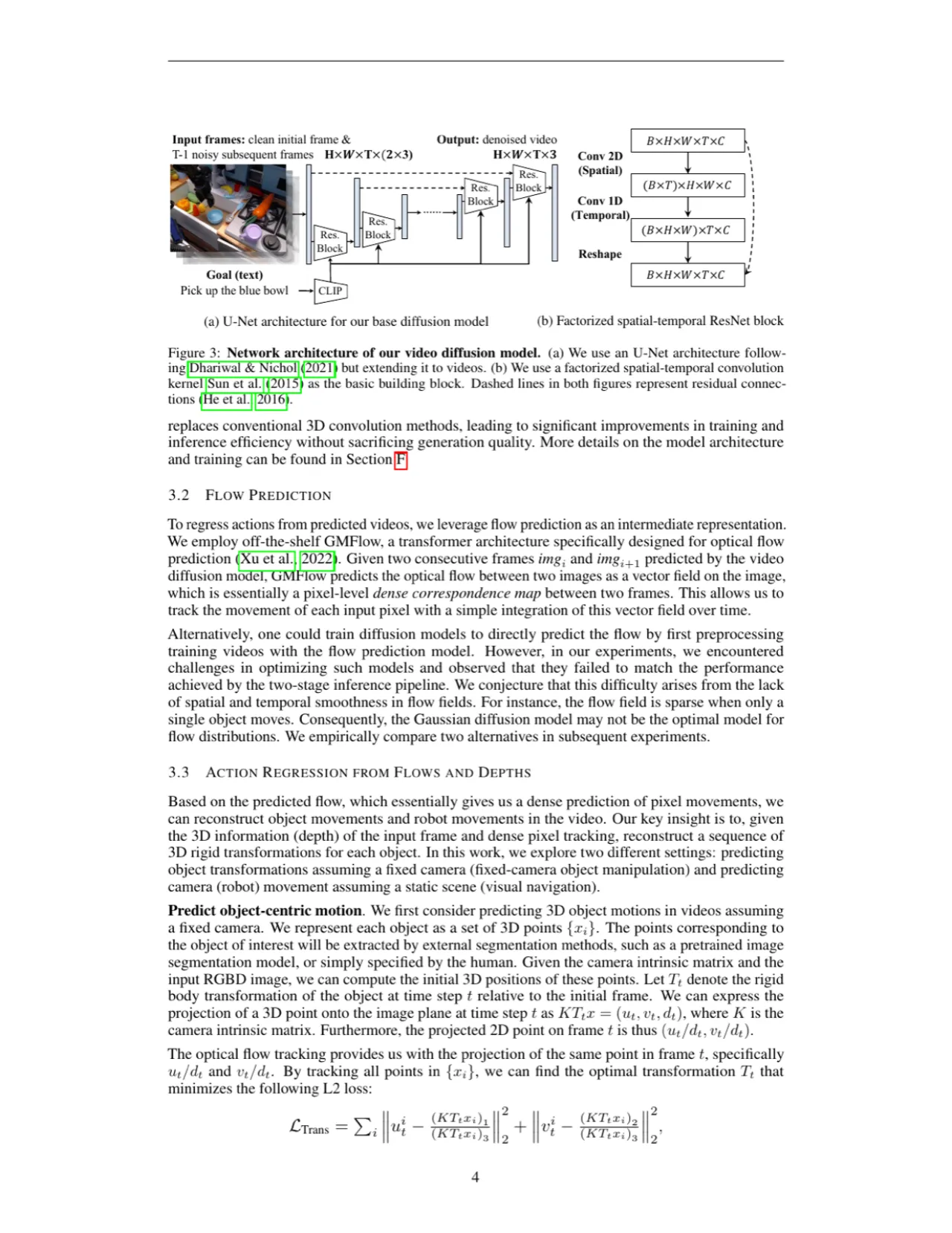
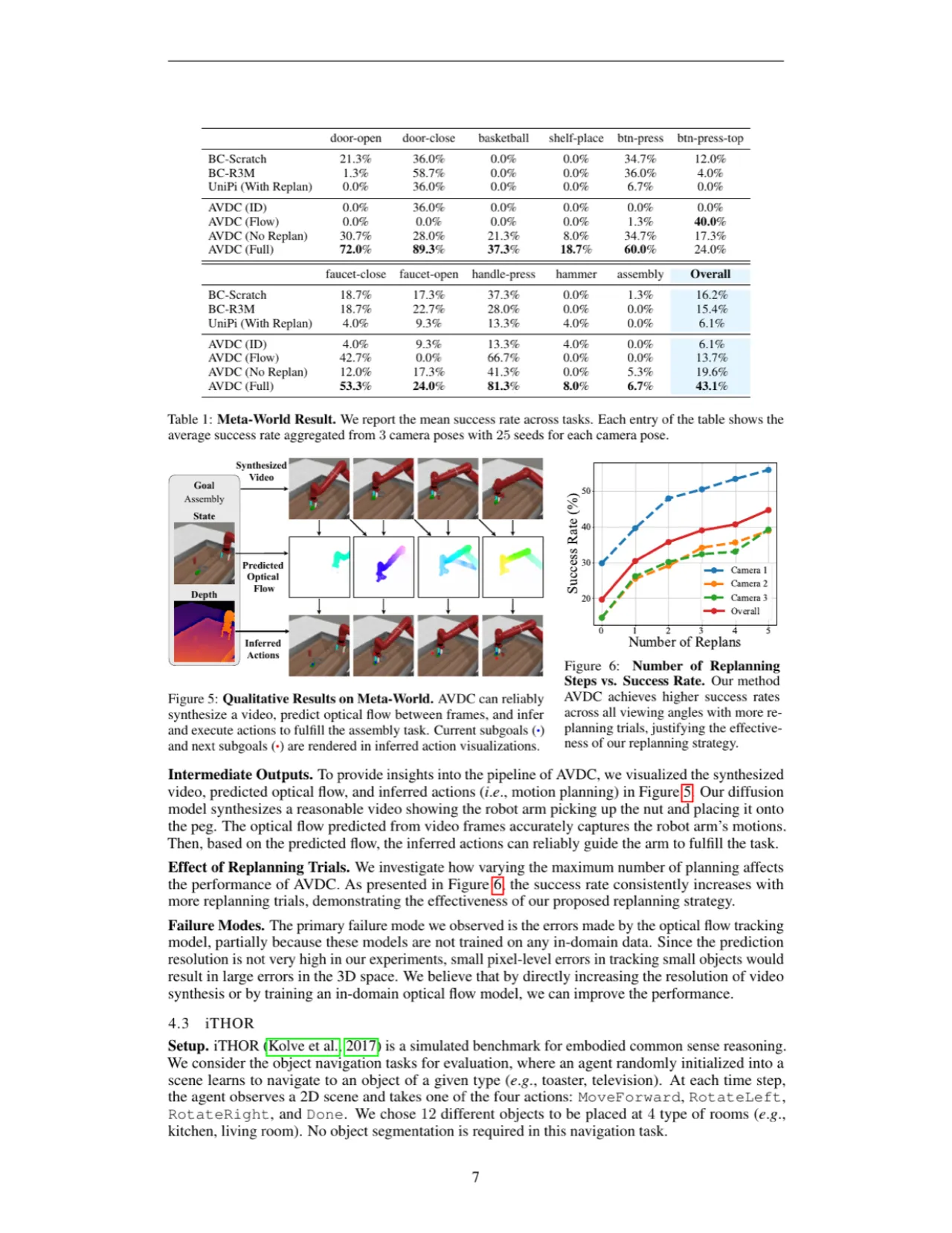
"We present a method for training a robot policy capable of reliably executing diverse tasks across different robots and environments from RGB video demonstrations without any action annotation."

165Meta-World 训练视频数(11 任务)
240iTHOR 训练视频数(12 类目标)
4训练所用 GPU 数量,1 天完成
10DDIM 推理步数(替代标准 100 步)
先前方法的局限性主要体现在两方面:
(1)基于逆动力学模型的方法(如 UniPi)需要知道精确步数,且通常以模态方式预测动作,训练开销大(需超过 256 TPU-pods);
(2)行为克隆(BC)类方法依赖专家动作标注,无法直接利用互联网视频资源。
AVDC 的核心洞见是:图像本身即可同时编码状态与动作信息——相邻帧之间的稠密光流对应关系天然蕴含了物体运动轨迹,可以以闭合形式解算 SE(3) 变换,无需学习任何额外动作预测器。