02 方法本文提出两大核心贡献:(1)ALOHA 遥操作硬件系统 ,以及(2)ACT(Action Chunking with Transformers)模仿学习算法 。两者协同作用,使低成本硬件能够从少量真实演示中学会精细双臂操作技能。
ALOHA:低成本双臂遥操作系统
ALOHA 以两条 ViperX 6-DoF 机械臂(~$5,600/臂)作为 follower,两条 WidowX 机械臂(~$3,300/臂)作为 leader,采用 joint-space mapping 进行遥操作——用户反向驱动 leader,follower 实时镜像。相比 task-space(末端执行器)映射,joint-space 映射在奇点附近控制更稳定、延迟更低。系统配备 4 路 Logitech C922x 网络摄像头(分辨率 480×640,帧率 30fps),包括顶部、正面和两个腕部摄像头,以 50Hz 采集数据。
ACT:Action Chunking with Transformers
针对模仿学习的两大难题——复合误差(compounding error) 和人类演示的非 Markov 噪声 ,ACT 提出了以下设计:
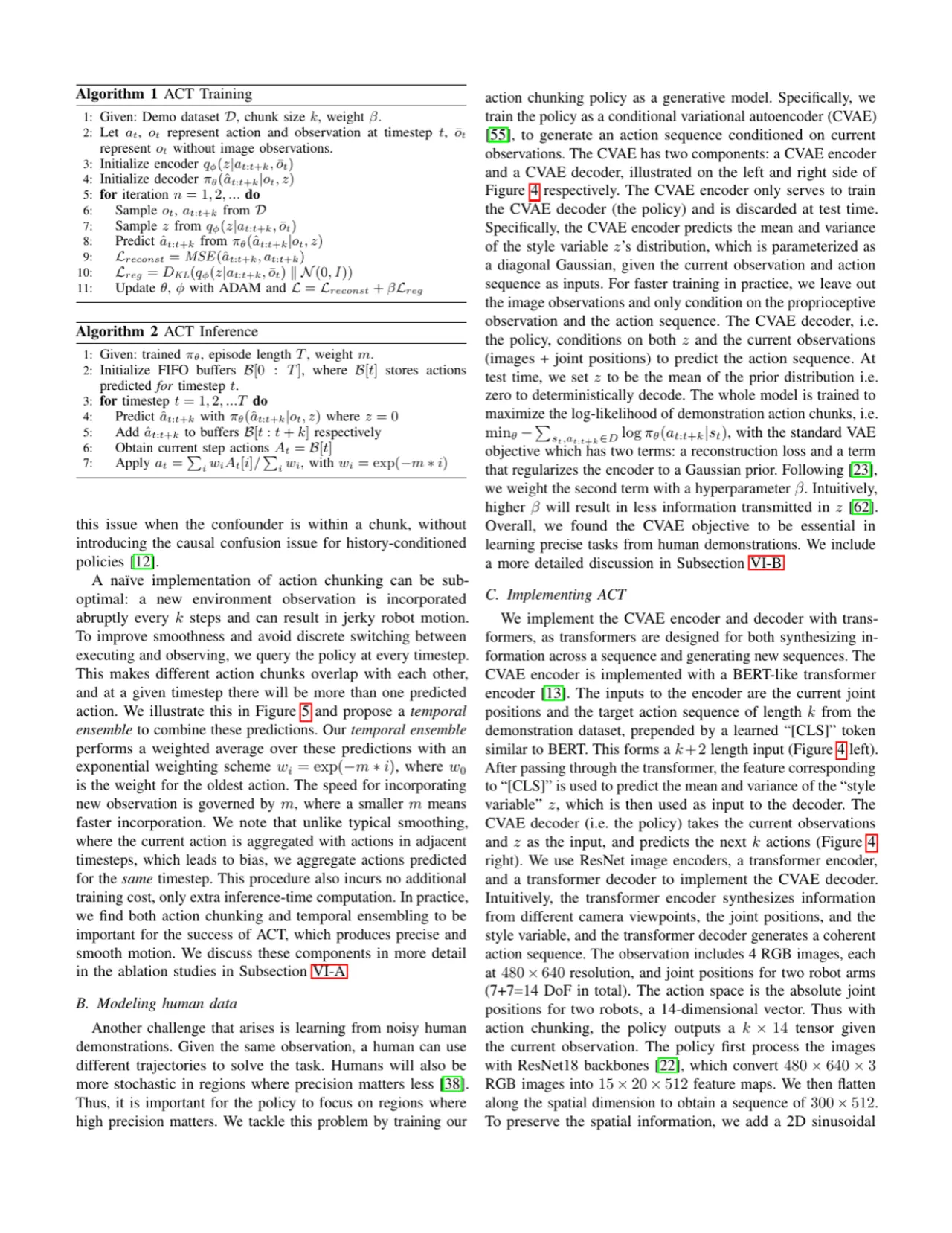
Action Chunking: 策略每次预测未来 k 步的动作序列(而非单步动作),将任务的有效时间跨度压缩 k 倍,大幅缓解复合误差。Temporal Ensembling: 每一时间步都查询策略,对多个重叠 action chunk 的预测结果按指数权重(wi = exp(−m · i) )加权平均,使轨迹更平滑,且无需额外训练代价。CVAE 训练目标: 将策略建模为 Conditional VAE ,通过"style variable" z 捕捉人类演示中的多模态性(multimodality)和随机性。CVAE encoder 在测试时丢弃,z 设为先验均值(即零向量)以确定性解码。
具体实现:CVAE encoder 采用 BERT-style Transformer encoder,输入为 [CLS] token + 关节位置 + 目标动作序列(长度 k+2);CVAE decoder(即策略)使用 ResNet18 图像编码器 + Transformer encoder-decoder,处理 4 路 480×640 RGB 图像及关节位置,输出 k×14 维动作序列(双臂绝对关节位置)。使用 L1 重建损失 + KL 散度正则化,共约 80M 参数,在单张 RTX 2080 Ti 上训练约 5 小时。
图 4:ACT 架构。左(训练时): CVAE encoder 将动作序列与关节观测压缩为 style variable z 的均值和方差。右(训练 + 推断): CVAE decoder(策略)融合多视角图像、关节位置和 z,通过 Transformer encoder 合成特征,再由 Transformer decoder 解码为 k 步动作序列。测试时 z=0(先验均值)。
数据采集
每个真实任务收集 50 条演示(Thread Velcro 任务收集 100 条),每条演示耗时 8–14 秒(400–700 步@50Hz),总数据量约 10–20 分钟/任务。演示具有固有随机性——例如空中换手的位置每次都略有不同——这要求策略学习任务的本质规律而非死记演示。