|
Yufeng Jin
I am a PhD student at
PEARL Lab at
TU Darmstadt, jointly advised by
Prof. Georgia Chalvatzaki and
Dr. Mathias Franzius
(Honda Research Institute Europe). Before starting my PhD in December 2023, I worked as a Robotics Perception Engineer at the Honda Research Institute Europe, where I conducted applied research in robot vision and teleoperation scenarios.
I received my Master’s degree in Mechatronics and Computer Science from the
Karlsruhe Institute of Technology (KIT) in 2021. |

|
Research |
|
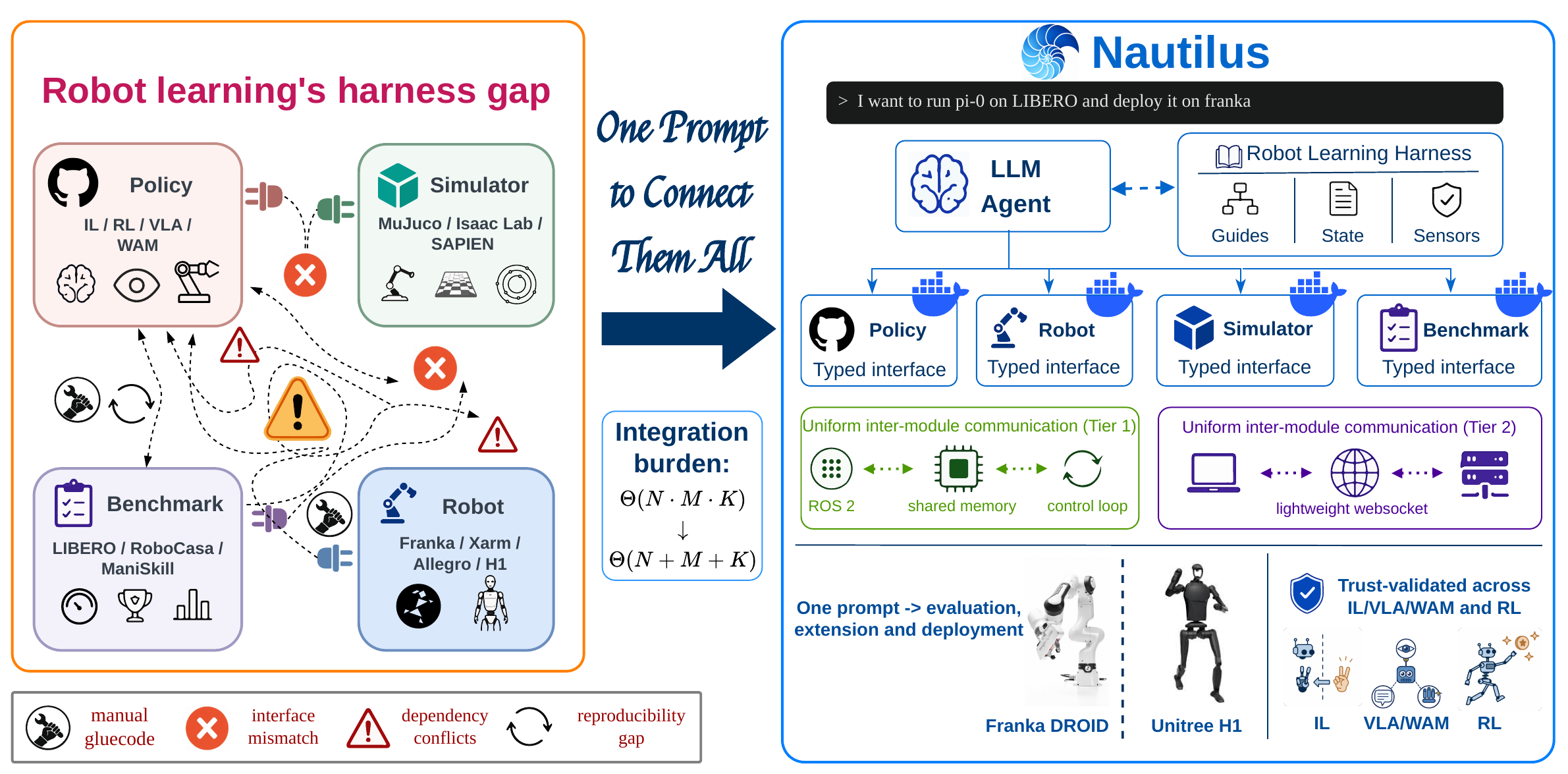
Yufeng Jin*, Jianfei Guo*, Xiaogang Jia, Yu Deng, Zechu Li, Han Liu, Weiran Liao, Vignesh Prasad, Mathias Franzius, Gerhard Neumann, Georgia Chalvatzaki arXiv, 2026 paper / website An open-source agentic harness that turns a single natural-language prompt into ready-to-use reproduction, evaluation, fine-tuning, and deployment workflows for robot learning research — chambered, contract-typed, and validated by construction. |
|
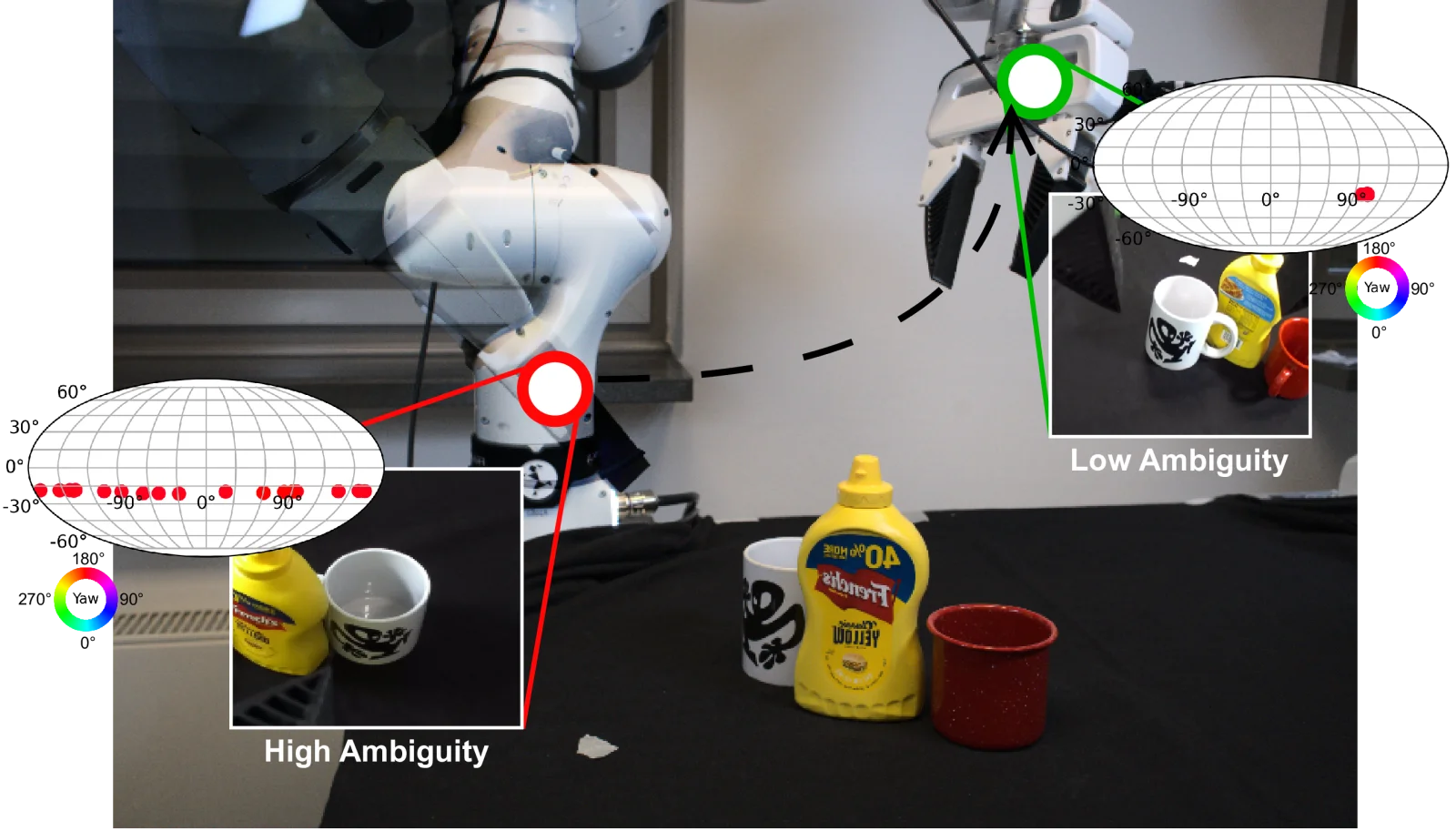
Yufeng Jin, Niklas Funk, Vignesh Prasad, Zechu Li, Mathias Franzius, Jan Peters, Georgia Chalvatzaki ICRA, 2026 paper / website A probabilistic framework that leverages flow matching on the SE(3) manifold to estimate full 6D object pose distributions, enabling uncertainty-aware robotic manipulation under partial observability, occlusions, and symmetries. |
|
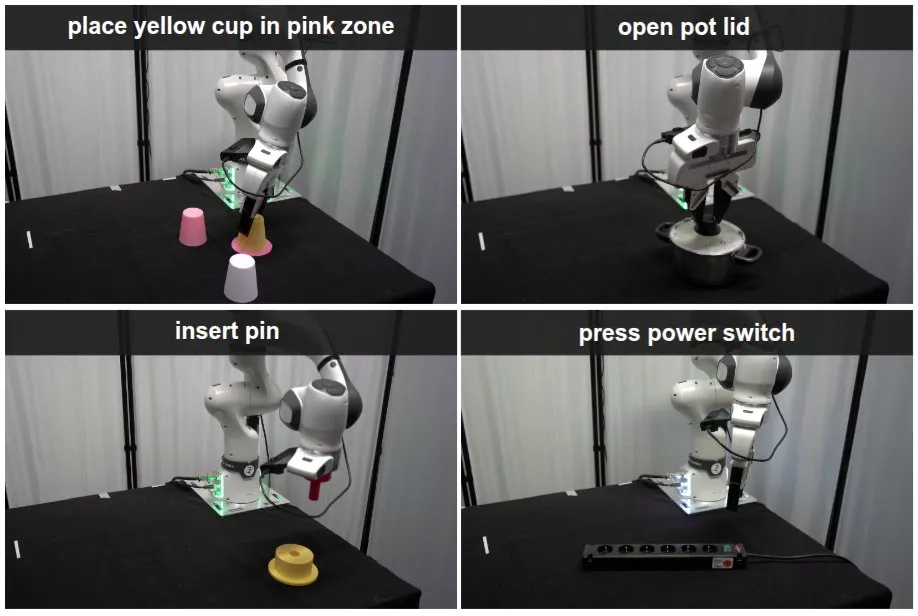
Yu Deng*, Yufeng Jin*, Xiaogang Jia, Jiahong Xue, Gerhard Neumann, Georgia Chalvatzaki arXiv, 2026 paper A method that distills geometric features from pre-trained diffusion models via Manifold Distillation into a deterministic Spatial-Semantic Feature Pyramid Network, achieving geometrically consistent visuomotor control for robot manipulation with real-time performance. |
|
Zechu Li, Yufeng Jin, Daniel Ordoñez Apraez, Claudio Semini, Puze Liu, Georgia Chalvatzaki CoRL, 2025 paper / website A novel RL framework that explicitly leverages the inherent morphological symmetry in bimanual robotic systems to enable ambidextrous control. |
|
|
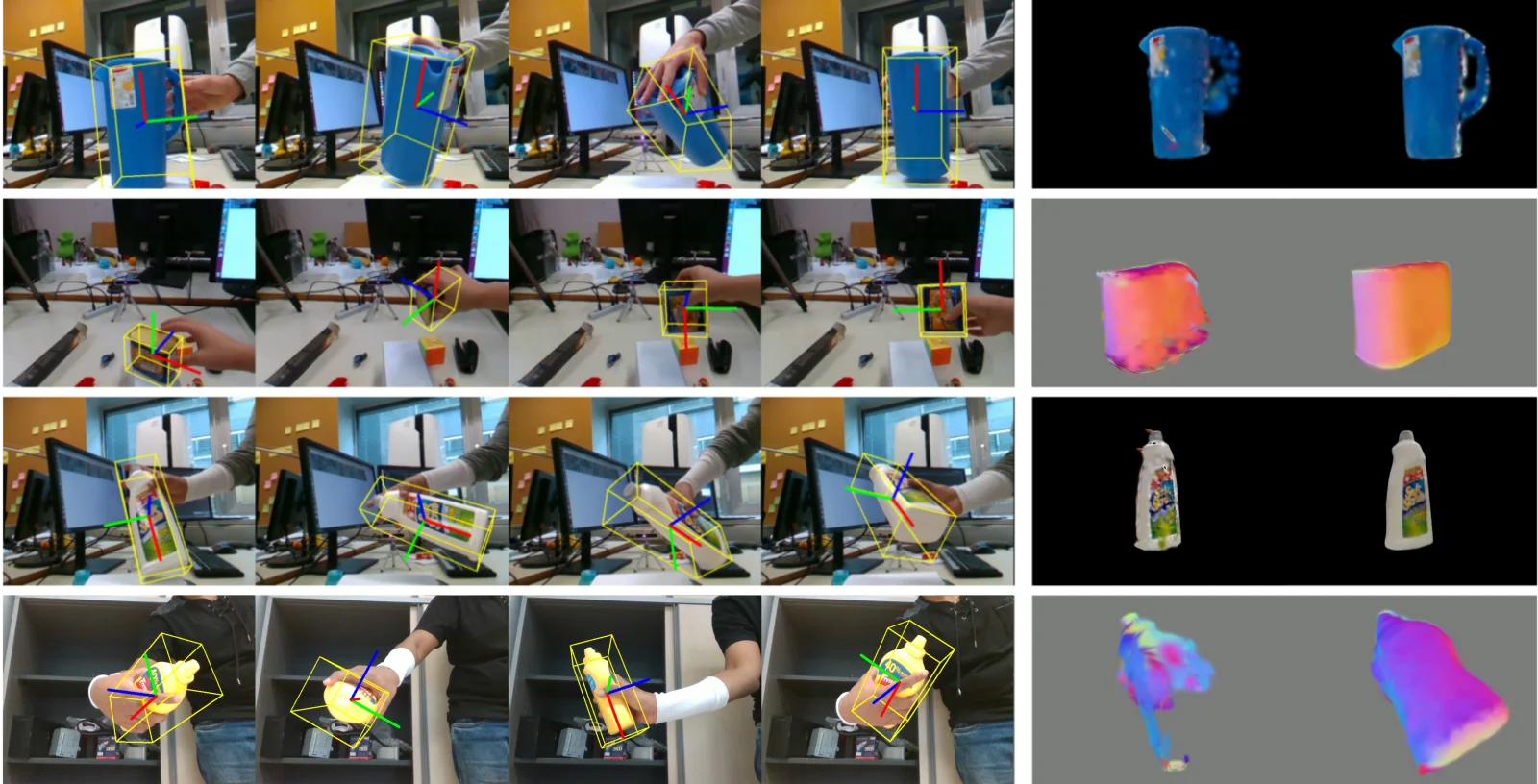
Yufeng Jin, Vignesh Prasad, Snehal Jauhri, Mathias Franzius, Georgia Chalvatzaki ICCV, 2025 paper / website A novel model-free framework for real-time 6D object pose estimation that leverages Gaussian Splatting for fast, accurate tracking and reconstruction from RGB-D input. |
|
Study Notes · Paper Snapshots · learning notes & illustrated 中文 paper notes
|